ロボットアーム
若田宇宙飛行士が操作するスペースシャトルのロボットアーム(SRMS)について紹介します。
使用する作業
スペースシャトルのロボットアームは、以下のような作業に使われます。
人工衛星等の放出と回収
国際宇宙ステーションの建設
船外活動(EVA)クルーをアームの先端にのせて、移動させたり、足場として利用する(EVA作業者は、スペースシャトル内部の作業者と連携して移動します。)
ロボットアームの肘や手首部に取り付けられたテレビカメラでスペースシャトル外部の点検を行う
主要諸元
全長
約15m
直径
約38cm
重量
約410kg
関節数
6(肩2ヶ所、肘1ヶ所、手首3ヶ所)
各関節は電気モータで駆動させます
最大取扱重量
約266トン(宇宙空間)
最大先端速度
何も把持していない状態:60cm/秒
物体を把持した状態:6cm/秒
最大回転速度
約5度/秒
ブームの素材
グラファイト・エポキシ複合材
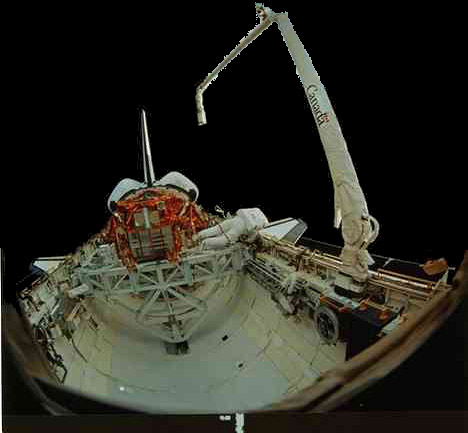
後部飛行デッキ側から見たスペースシャトルのロボットアーム(SRMS)
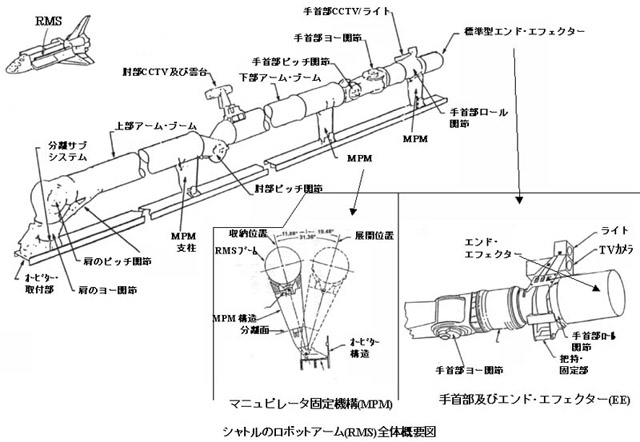
スペースシャトルのロボットアーム(SRMS)全体概要図
ロボットアームの操作
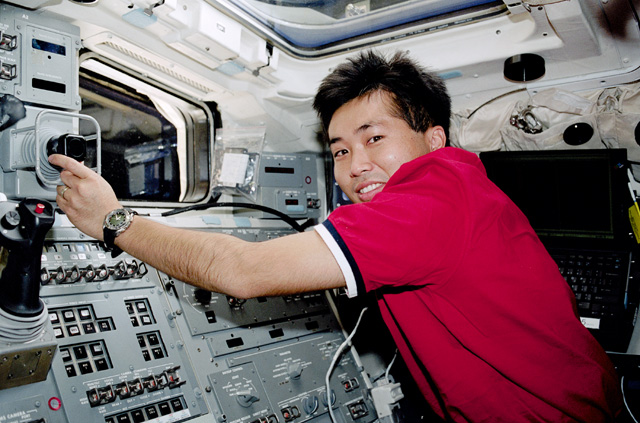
ロボットアームの操作(STS-92)
ロボットアームの操作は、スペースシャトルの船室の中で行われます。ちょうど操縦席の後ろの「後部飛行デッキ(AFD)」から窓越しに、あるいは、2台のテレビモニタを見ながら操作します。
ロボットアーム先端の関節を基準とした場合、左手でロボットアーム先端の位置を変える並進用ハンドコントローラー(THC)、右手でロボットアーム先端の姿勢を変える回転用ハンドコントローラー(RHC)を操作してロボットアームを動かします。
並進用ハンドコントローラ(THC)
回転用ハンドコントローラ(RHC)
把持方法
エンドエフェクタ (写真は「きぼう」ロボットアームのもので、SRMSと同一)
ロボットアームは、どのようにして物体をつかんでいるのでしょうか?人間の手やマジックハンドのようなものを思い浮かべる方も多いと思いますが、実は次の仕組みでつかむのです。
ロボットアームの先端は、エンドエフェクターと呼ばれる中が空洞になった円筒形をしており、その中にある3本のワイヤで物体を固定します。
一方、持ち上げられる物体の方には、グラプル・フィクスチャと呼ばれる棒状の突起物が必要です。エンドエフェクター内の3本のワイヤで、この棒を中央に引き寄せて固定しています。
しかし、全長15mもあるロボットアームを動かしてグラプルフィクスチャを確実にとらえるには、照準器のようなものが必要になります。グラプルフィクスチャには、そのためのターゲットが取り付けられており、TVカメラからの映像をもとにそのターゲット上に突き出た棒がまっすぐに立つ状態を維持しながら接近させます。棒との角度が傾くと、棒を上から見たときの同心円がずれて見えるので、すぐに判ります。
グラプル・フィクスチャ/ターゲット
エンド・エフェクターとグラプル・フィクスチャ
ロボットアームによるペイロードの把持シーケンス
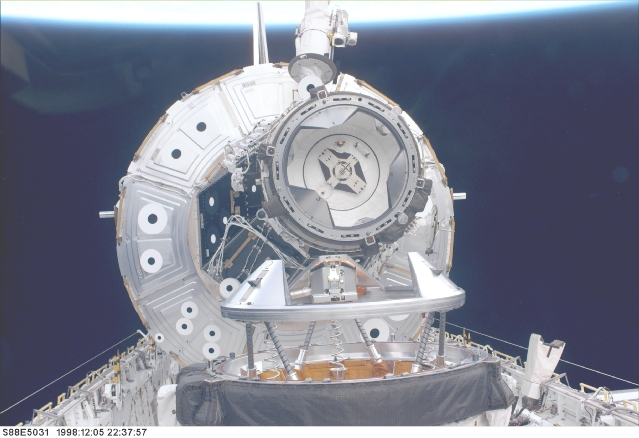
宇宙視覚システム SVS(Space Vision System)
ユニティに設置されたSVSターゲット(白地に黒い丸の部分)
宇宙視覚システム(SVS)は、目標物に取り付けられたSVSターゲット(通常、黒丸状のマークを使用)をTVカメラで撮影し、このビデオ映像を画像解析することによって、目標物の位置、姿勢、移動率を実時間で精密に測定するものです。このシステムは、カナダのNeptec社により開発されました。
目標物に取り付けられた複数個のドット・パターンがSVSのターゲットとして使用されます。これらのターゲットの取り付け位置は地上で3次元的に精密に測定されており、この基準データを元にターゲットの動きを測定します。また、TVカメラのレンズ特性等も飛行前に把握しておく必要があります。この測定された情報はモニタ画面にグラフィックスと数値で宇宙飛行士に提供されます。
必要な測定精度を出すためには少なくとも3個以上(5個が望ましい)のSVSターゲットが見えている必要があります。また、照明の条件や熱による変形等による誤差も生じますので、これらを最小限に抑える必要があります。
ISS構成要素の結合は、スペースシャトルロボットアームや、ISSのロボットアーム(SSRMS)を使って行いますが、SVSはこれらの結合作業時に、位置決めする時の許容誤差が小さい構成要素の結合作業時などにおいて不可欠な技術です。
ロボットアームの操作モード
ロボットアームは、スペースシャトルのクルーの操作で自由に動かせますが、地上で計算した軌跡に沿って自動で動くオートモードという機能もあります。また、1つの関節だけを駆動するモードなどもあり、必要に応じてこれらを切り替えて使用します。
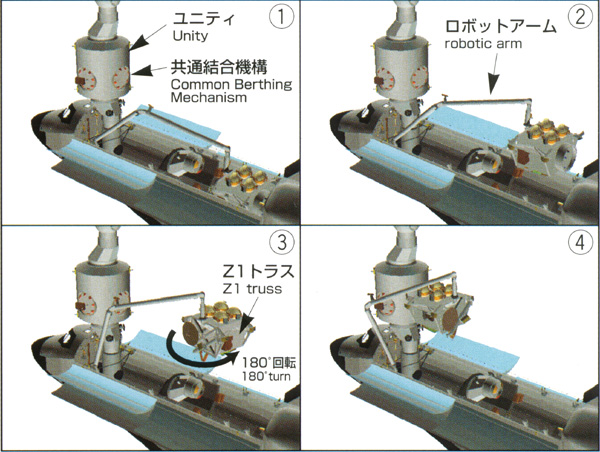
Z1トラスの取り付け手順
Z1トラスの取り付け手順
(1) はじめに、スペースシャトルのロボットアームでペイロードベイ(貨物室)に固定されているZ1トラスをつかみます。その後、船内からの操作でZ1トラスをペイロードベイに固定している機構を外し、Z1トラスを持ち上げます。
(2) ロボットアーム操作卓に設置されたテレビモニタでカメラ画像などを見ながらロボットアームを操作し、Z1トラスをゆっくりとユニティへ移動させます。
(3) ユニティとZ1トラスの結合面を向かい合わせるために、Z1トラスの向きを180度回転させます。
(4) Z1トラスがユニティに約60cmまで接近した時に宇宙視覚システム(SVS)を利用し、Z1トラスをさらに正確にユニティの結合位置まで移動させます。Z1トラスをユニティの共通結合機構(CBM)に仮結合させた後、船内からの指令により、CBMに格納されていた16本の駆動ボルトで結合させます。宇宙でのCBMの結合は、Z1トラスが初めてのケースになります。
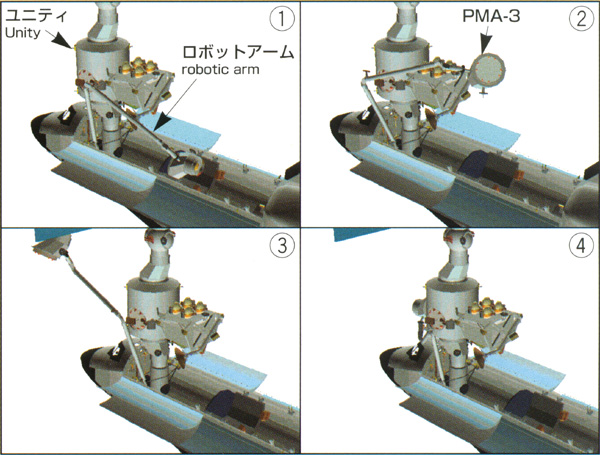
PMA-3の取り付け手順
PMA-3の取り付け手順
PMA-3の取り付け手順も基本的にZ1トラスト同様ですが、船外活動を行うクルーとの連携が重要な作業になります。船外活動のクルーは、まずPMA-3をペイロードベイ内のスペースラブパレットに固定しているボルトを取り外し、その後で若田宇宙飛行士がロボットアームを使ってPMA-3をペイロードベイから取り出し、ユニティ側に移動させます。ユニティへの取り付けは、Z1トラスと同様にスペースビジョンシステムによる位置姿勢情報を用いて行い、船外活動クルーはその取り付け作業をモニタします。
最終更新日:2000年 9月 28日