
|
||||||
 |
| Z1トラス |
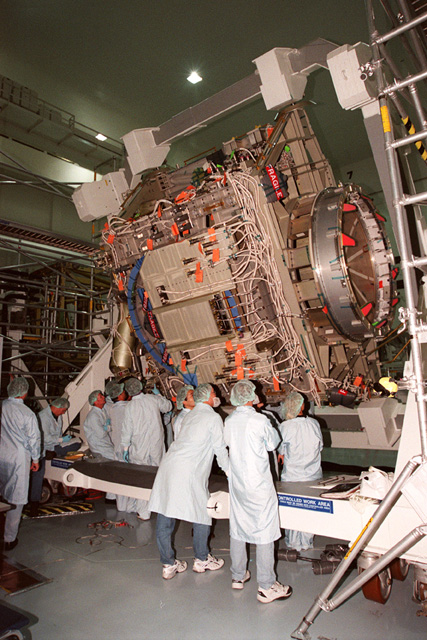
Z1トラスは骨組構造の構造体で、重量約8.3t、長さと幅は約4~5mあり、アルミニウム合金で作られいて、今回のSTS-92ミッションでユニティに取り付けられます。
Z1トラスには、コントロール・モーメント・ジャイロ (CMG)と呼ばれる姿勢制御を行う装置4基と、地上と通信するためのSバンド及びKuバンドアンテナ、直流変圧器(DDCU)等の装置が搭載されます。姿勢制御装置と通信アンテナはZ1トラスに取付けた状態で打ち上げ、直流変圧器と船外活動用工具箱は軌道上で船外活動により取付けます。また、Z1トラスには、次回のスペースシャトルミッションSTS-97(4A)でP6トラスおよび太陽電池パドルが取り付けられる予定です。
Z1トラスのZ1とは、Zenith(天頂方向)のZに由来しています。
ISSのトラスには、この他、S0~S6トラス、P1~P6トラスがありますが、これらはそれぞれ、Starboard(右舷)、Port(左舷)のトラスという意味です。
|
 MBM設置面の反対側から見た図 |
|||||
 MBM(Manual Berthing Mechanism:手動結合機構) ETSD(EVA Tool Stowage Device:EVA工具箱) RPCM(Remote Power Controller Module:遠隔電力制御装置) |
今回のミッションでは、ユニティにZ1トラスとPMA-3を結合するために初めてCBM結合が行われます。これは今後のISS組立フライトの成否に係わる重要な作業です。
CBMはロシア以外のISS与圧エレメント間を結合するために共通的に使用される結合機構であり、「きぼう」日本実験棟でも使われます。CBMには、モータ駆動で結合を行うアクティブ側(把持ラッチ4個、構造結合用の電動ボルト16個を有する)と受動的なパッシブ側があり、気密を保持するために巨大なO リング・シールが取り付けられています。この両者を軌道上で結合することによって、与圧を保ったまま、宇宙飛行士がISSの各モジュール間を移動することができるようになります。 Z1トラスとPMA-3側には、パッシブ側の共通結合機構が使われており、ユニティ側に取り付けられたアクティブ側CBMからの制御で、結合されます。CBMを結合させるには、各モジュールをCBMのキャプチャーラッチ部で把持できる距離(10数cm)まで、ロボットアームで精密に接近させる必要があります。キャプチャーラッチでの結合作業が終了すると、16本のモータ駆動の電動ボルトを軽く締めて仮結合した状態で、構造部の歪みを防ぐために両CBM(ACBM、PCBM)の温度差が小さくなるのを待ち、その後、電動ボルトをきつく締め付け最終的な構造結合が実施されます。
このCBM結合は、非常に精密なロボットアームの操縦や、クルー同士の連携が必要となる難易度の高い作業になります。受動側のCBMはZ1トラスに取り付けられた状態で打ち上げられます。
CBMには、宇宙での過酷な温度環境や、デブリ(宇宙ゴミ)の衝突などから自らを守るためにカバーが取り付けられています。 アクティブ側のCBMには、4個の可動式カバーと、1個の中央カバーの2種類のカバーが使われています。可動式カバーは、コマンドにより開閉できるようになっており、結合前に「開」状態にされます。中央カバーは、カバーを取り付けたままでの結合が可能であり、結合完了後に、ハッチを開けて内部からクルーが取り外すことになっています。
CBM内の開口部は、約1.3m×約1.3mありますので、実験ラックなどを容易に通過させることができます。
CBMについてはこちらも参考にご覧下さい。
 |
|
| PCBM (受動側のCBM, Z1トラス側) |
ACBM (能動側のCBM, ユニティ側) |
 |
| コントロール・モーメント・ジャイロ(CMG) |
CMGは、大型の宇宙機の姿勢を制御するための回転力を発生する装置で、人工衛星の姿勢制御に使用されているリアクション・ホイール(*1)よりも大きな角運動量、トルクを発生できます。
CMGは、ジンバル(*2)に取り付けられたフライホイール(*3)を一定の速度で回転(ISSでは6,600rpm)させ、大きな角運動量を持たせておき、ジンバルに取り付けられたフライホイールを別のモータでジンバルごと傾けることにより、地球ゴマのおもちゃで体験できるようなジャイロ効果による大きな回転力を発生することができます。
この力の大きさは、フライホイールの角運動量とジンバルの回転速度の積となり、リアクション・ホイールに比べ、数十倍のトルクが得られます。
CMGはこれまで、アメリカのスカイラブとロシアのミール宇宙ステーションで使用されました。CMGはZ1トラスに取り付けられた状態で打ち上げられます。
*1.リアクション・ホイール:フライホイール(はずみ車)の回転数を変化させることにより、加減速のためのトルクの反作用で、人工衛星本体の姿勢を変える装置です。
*2.ジンバル:自由な姿勢をとれるようにする装置。船のコンパスや飛行機搭載カメラなどの架台に使用されています。
*3.フライホイール(はずみ車):質量をもった円盤を回転させることにより、角運動量を保存し、一定の姿勢に保つ装置です。
Sバンド通信システムは、ISSの運用データや音声データを地上と送受信するシステムです。
Kuバンド通信システムは、ISSで得られた様々な実験データや画像・音声データなどの大容量データを、地上に送信するためのシステムです。


