


第1回船外活動(飛行4日目)
最終更新日:2006年12月1日
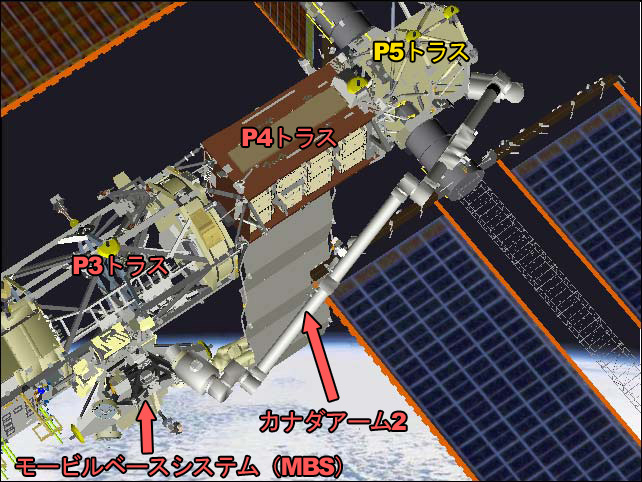
第1回船外活動は、EV(Extra Vehicular)1のロバート・カービーム宇宙飛行士と、EV2のクリスター・フューゲルサング宇宙飛行士が担当します。第1回船外活動では、P4トラスへのP5トラスの結合、P5トラスの把持部の移設、S1トラス上の外部TVカメラ(External TV Camera Group: ETVCG)の交換作業を行います。
P5トラスのP4トラスへの結合
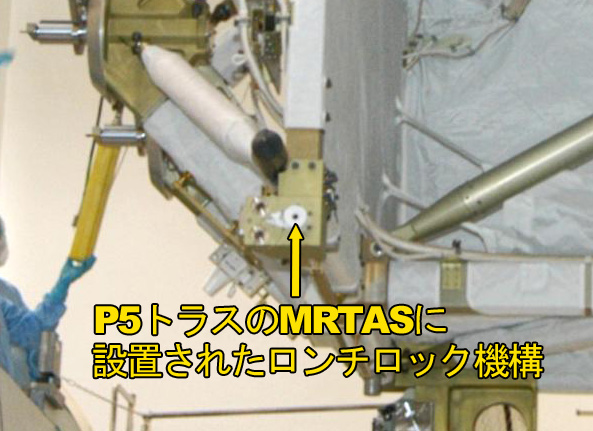
MRTASのロンチロック機構
P5トラスの結合
船外活動クルーは、P5トラスをP4トラスへ結合させる前に、P4トラスとの結合部となるP5トラスの改良型トラス結合システム(Modified Rocketdyne Truss Attachment System: MRTAS)4基に設置されているロンチロック機構の取外しを行います。
船外活動クルーがロンチロック機構を取り外した後、船内のクルーが「カナダアーム2」(ISSのロボットアーム)を使い、P5トラスをP4トラスの取付け位置へ近づけます。この際、船外活動クルーは構造的な間隔を目視して、その情報をカナダアーム2を運用するクルーに伝え、運用を支援します。
P5トラスが取り付け位置に仮設置された後、船外活動クルーはピストル型パワー・ツール(Pistol Grip Tool: PGT)を使用して、P5トラスの各隅にあるMRTAS4基のボルトを締めP4トラスと結合させます。
把持部の移設
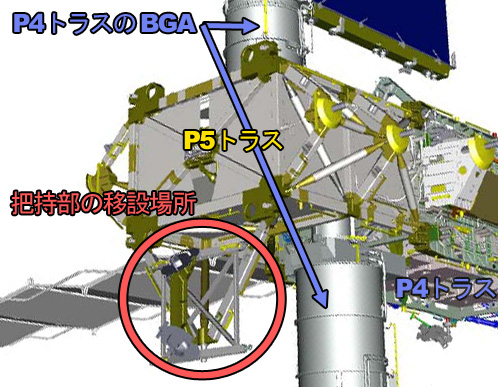
把持部をキール部へ移設したイメージ
P5トラスをP4トラスへ結合後、船外活動クルーは、P5トラスに設置されている把持部の移設作業を行います。
P5トラスに設置されている把持部は、P5トラスの結合作業時に、スペースシャトルのロボットアーム(SRMS)からカナダアーム2へP5トラスを受け渡すために使用されます。P5トラスがP4トラスへ結合した後、把持部が打上げ時の設置場所のままだと、後にP4トラスのベータ・ジンバル・アセンブリ(Beta Gimbal Assembly: BGA)が回転する際に干渉するため、船外活動クルーがP5トラスのキール部へ移設します。
S1トラスに設置されている外部TVカメラ(ETVCG)の交換
S1トラスに設置されているETVCGは故障のため、船外活動クルーは新しいカメラとの交換作業を行います。このカメラは次回のSTS-117ミッションにおいて、S3/S4トラスの取付け作業時に必要となります。
(写真、画像は全てNASA提供)