


現在、私は国際宇宙ステーション(ISS)のロボットアームに関する訓練を受けているので、今月と来月の2回に分けて、そのロボットアームについてご紹介したいと思います。今月はロボットアームとはどんなものか、来月は具体的に宇宙飛行士がどのような訓練を受けているのかについて、書きたいと思います。
ISSのロボットアーム(以下単にロボットアームと呼ぶ)は、カナダによって作られ、2001年に打ち上げられ、以降ISSの組み立てや実験装置の移設・取り外し、「こうのとり」をはじめとする補給船のキャプチャ(掴まえること)などに八面六臂の活躍を見せています。

写真は「こうのとり」2号機をキャプチャした状態のロボットアーム
その形状は身近な例で言えば、文房具のコンパスのような形をしています。ロボットアームを目一杯伸ばすと約17mもの長さになりますが、それでも全幅100mを超えるISSと比べると、とても小さいですね。そのままではISSの隅の方へはとても手が届きません。
そこでこのロボットアームには、いくつか作業範囲を広げる為の仕掛けが施されています。
まず1つ目は、ロボットアームを載せて動かせる台車です。ISSの主要構造部にレールが敷いてあって、ロボットアームごとその上を台車が動けるようになっているのです。
そして2つ目は、ロボットアーム自体がISS上を尺取虫のように移動していく方法です。例えが古いのでわかりにくいですね、もう少し具体的に説明しましょう。
ロボットアーム自体は機械ですから、動く為には電気や通信回路が必要です。電気でモーターを駆動して、アームの各関節を動かし、通信回路によってその動きをコントロールするわけです。その電気と通信を供給する、言わばコンセントのようなものがISSの各モジュールに取り付けられています(専門用語でPDGFと呼ばれています)。
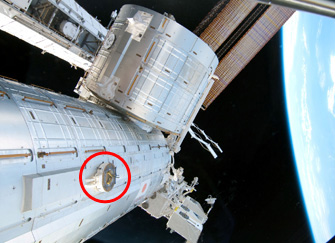
写真の赤丸は、日本の実験棟「きぼう」に取り付けられているPDGFです
先ほどのコンパスの例えに戻ると、今、コンパスの1本の脚がコンセントAに取り付けられているとしましょう。コンパスには、コンセントAから電気と通信が供給されています。
その状態から、コンパスを開いていって、もう1本の脚で別の場所にあるコンセントBを掴むことが出来たとします。そうすると、今度はそのコンセントBから電気と通信を供給してもらうことが出来るので、元々のコンセントAを掴んでいた脚を離して、コンセントBを支点として、また別の場所にあるコンセントCを掴みに行くことが出来るわけです。
・・・言葉で説明するのは難しいですね(汗)
ISS上を、コンパスの2本の脚を交互に動かすように移動していくロボットアームの姿が想像出来ましたでしょうか??
ロボットアームがどのように作業場所へ移動するかについてお話しました。次は、実際にどのように作業するかですね。
ロボットアームは読んで字の如く機械的な腕(アーム)なので、その最も重要な役割は大きな物を運ぶことです。日本の実験棟「きぼう」も、かつてスペースシャトルで打ち上げられ、ロボットアームによってISSへ取り付けられました。
「物を運ぶ」ためには、もちろんその前に「物を掴む」という動作が必要になってきます。そのため、ロボットアームの2本の腕(コンパスの例えでは脚という単語を使いましたが、ロボットアームでは腕と呼ぶのが適切でしょう)の先端は、それぞれが物を掴めるようになっているのです。先にお話したとおり、1本の腕はコンセントを掴んでいる必要がありますので、もう1本の腕で目的の物を掴みにいくわけです。
ここで私たち人間の腕が机の上の物を取る場合を考えてみましょう。
私たちはまず、目で対象となる物を見て、その形状を判断し自分との距離を推測します。次に、その物を掴むために肩から手の指先にいたる関節をどのように動かせばいいかを瞬時に脳が判断します。そして実際に筋肉を使って関節を動かすことによって、物を取ることが出来るわけです。
ロボットアームで物を掴む時も、これと全く同じ事をします。ISSやロボットアーム自体に取り付けられたカメラからの映像で対象物との距離を判断します。そしてロボットアームには、3次元の空間で自由に動き回れるように、全部で7つの関節があります。人間の腕と同じように、肩・肘・手首にあたる位置に関節が配置され、それぞれの動きを組み合わせることで任意の位置に腕を持っていくことが可能になっているのです。
関節の動きはコンピューター(脳)によって制御され、電気を利用したモーター(筋肉)によって駆動されます。もちろん、そのコンピューターに命令を送るのは人間の仕事なので、それが私たち宇宙飛行士、もしくは地上のエンジニアたちの仕事になるわけですね。
以上、ざっとロボットアームとはどんなものなのかということについて書いてきましたが、いかがでしたでしょうか?もしここがわからない、もっと詳しく説明して欲しいといった点がありましたらご意見募集のフォームからご質問頂ければ、可能な範囲で次回お答えしたいと思います。
次回は、宇宙飛行士のロボットアーム訓練の模様について書きますね。
※写真の出典はJAXA/NASA