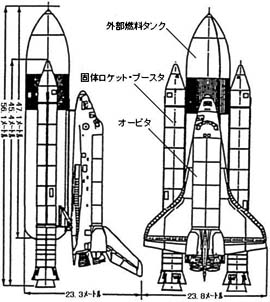
ƒXƒyپ[ƒXƒVƒƒƒgƒ‹‚حژں‚جƒIپ[ƒrƒ^پAŒإ‘جƒچƒPƒbƒgپEƒuپ[ƒXƒ^پAٹO•””R—؟ƒ^ƒ“ƒN‚©‚çچ\گ¬‚³‚ê‚ؤ‚¢‚ـ‚·پB‚»‚ê‚ـ‚إ‚ج‰F’ˆ‘D‚ھژg‚¢ژج‚ؤ‚¾‚ء‚½‚ج‚ة‘خ‚µ‚ؤپAƒIپ[ƒrƒ^‚ئŒإ‘جƒچƒPƒbƒgƒuپ[ƒXƒ^‚حŒJ‚è•ش‚µ—ک—p‚إ‚«‚é‚و‚¤‚ةگفŒv‚³‚ê‚ؤ‚¢‚ـ‚·پB
 |
ƒIپ[ƒrƒ^ |
|
ƒXƒyپ[ƒXƒVƒƒƒgƒ‹–{‘جپB’n‹…‚ة‹Aٹز‚µ‚½Œمگ®”ُ‚³‚ê‚ؤپAچؤ—ک—p‚³‚ê‚ـ‚·پB |
|
| ’·پ@‚³ |
37.2m |
| ƒEƒCƒ“ƒOƒXƒpƒ“ |
23.8m |
| ٹٹ‘–ژچ‚‚³ |
پ`17m |
| ژهƒGƒ“ƒWƒ“(3Œآ)‚جگ„—ح |
ٹe178tپiگ^‹َ’†پj |
| ‹O“¹گ§ŒنƒGƒ“ƒWƒ“(2Œآ)‚جگ„—ح |
ٹe2.72tپiگ^‹َ’†پj |
ژpگ¨گ§Œن
ƒGƒ“ƒWƒ“ |
ژهƒGƒ“ƒWƒ“پi36Œآ)‚جگ„—ح |
0.3946tپiگ^‹َ’†پj |
| ƒoپ[ƒjƒAƒGƒ“ƒWƒ“(6Œآ)‚جگ„—ح |
0.0113tپiگ^‹َ’†پj |
|
|
 |
|
Œإ‘جƒچƒPƒbƒgپEƒuپ[ƒXƒ^پi2–{پj |
|
ٹO•””R—؟ƒ^ƒ“ƒNپi1–{پj |
|
‘إ‚؟ڈم‚°‚©‚ç–ٌ2•ھٹش”Rڈؤ‚µپAگط‚è—£‚³‚ê—mڈم‚ة—ژ‰؛‚µ‚ـ‚·پB‚»‚جŒمپA‰ٌژû‚³‚êگ®”ُ‚ًژَ‚¯پAچؤ—ک—p‚³‚ê‚ـ‚·پB |
|
‘إ‚؟ڈم‚°Œم–ٌ9•ھ‚إ”R—؟‚ج‰t‘جگ…‘f‚ئ‰t‘جژ_‘f‚ھ‚ب‚‚ب‚é‚ئگط‚è•ْ‚³‚ê‚ـ‚·پB |
|
| ’¼پ@Œa |
3.7m |
| چ‚پ@‚³ |
45.4m |
| گ„پ@—ح |
ٹe1350t |
|
|
|
|
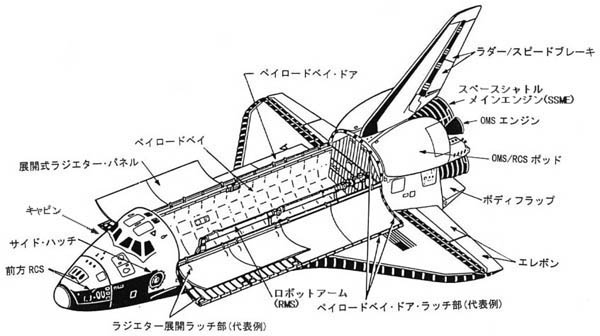
ƒXƒyپ[ƒXƒVƒƒƒgƒ‹‚ج“·‘ج’†‰›•”‚ة‚حپAƒyƒCƒچپ[ƒhƒxƒCپiƒJپ[ƒSƒxƒC‚ئŒؤ‚خ‚ê‚邱‚ئ‚à‚ ‚è‚ـ‚·پj‚ئŒؤ‚خ‚ê‚é’¼Œa4.6mپA’·‚³18.3m‚ج‰ف•¨ژ؛‚ھ‚ ‚è‚ـ‚·پB
‚±‚±‚ة‚حƒچƒ{ƒbƒgƒAپ[ƒ€(RMS)‚âٹeƒ~ƒbƒVƒ‡ƒ“–ˆ‚ةگد‚ف‘ض‚¦‚éژہŒ±‘•’uپA‰qگ¯‚ب‚ا‚ھ“‹چع‚³‚ê‚ـ‚·پB
ƒXƒyپ[ƒXƒVƒƒƒgƒ‹‚جŒم•”‚ة‚حƒXƒyپ[ƒXƒVƒƒƒgƒ‹پEƒپƒCƒ“ƒGƒ“ƒWƒ“پiSSME)‚ئŒؤ‚خ‚ê‚é‰t‘جژ_‘f‚ئ‰t‘جگ…‘f‚ً”R—؟‚ئ‚·‚éƒGƒ“ƒWƒ“‚ھ‘•”ُ‚³‚ê‚ؤ‚¢‚ـ‚·‚ھپA‚±‚ê‚ح‘إڈم‚°ژ‚ة‚¾‚¯ژg—p‚³‚êپA‹O“¹ڈم‚إ‚حژg—p‚µ‚ـ‚¹‚ٌپB‹O“¹ڈم‚إ‚ح‹O“¹گ§ŒنƒVƒXƒeƒ€پiOrbital
Maneuvering SystemپFOMSپj‚ھژg—p‚³‚ê‚ـ‚·پB‚ـ‚½ƒXƒyپ[ƒXƒVƒƒƒgƒ‹‚جژpگ¨گ§Œن‚حپARCS‚ئŒؤ‚خ‚ê‚éڈ¬Œ^‚جƒXƒ‰ƒXƒ^پ[پi•¬ژث‘•’uپj‚ھژg‚ي‚ê‚ؤ‚¢‚ـ‚·پB
پ@
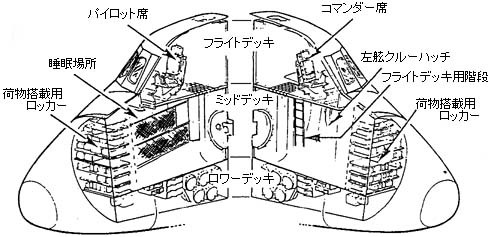
ƒXƒyپ[ƒXƒVƒƒƒgƒ‹‚جƒLƒƒƒrƒ“(ڈوˆُ‹و‰و)‚حپAڈم‚©‚çƒtƒ‰ƒCƒgƒfƒbƒLپAƒ~ƒbƒhƒfƒbƒLپAƒچƒڈپ[ƒfƒbƒL‚جژO‘w‚ة•ھ‚©‚ê‚ؤ‚¢‚ـ‚·پB
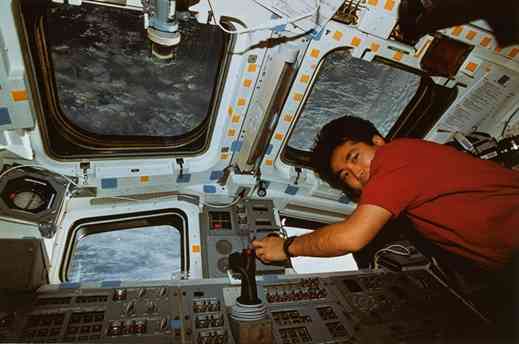
ƒtƒ‰ƒCƒgƒfƒbƒL‚حپAƒVƒƒƒgƒ‹‚ج‘€ڈc‚ًچs‚¤‚ئ‚±‚ë‚إ‚·پB’nڈم‚ئ‚ج’تگM‚âƒچƒ{ƒbƒgƒAپ[ƒ€‚ج‘€چىپA‚¨‚و‚ر’n‹…ٹد‘ھ‚à‚±‚±‚©‚çچs‚ي‚ê‚ـ‚·پB
ƒ~ƒbƒhƒfƒbƒL‚حپAƒNƒ‹پ[‚جگ¶ٹˆ‚·‚é‹و‰و‚إ‚·پBگHژ–‚âگ‡–°‚ً‚±‚±‚إ‚ئ‚è‚ـ‚·پBƒgƒCƒŒ‚à‚±‚±‚ة‚ ‚è‚ـ‚·پB‚ـ‚½پAƒyƒCƒچپ[ƒhƒxƒC‚ة“‹چع‚³‚ꂽ‰F’ˆژہŒ±ژ؛‚âƒhƒbƒLƒ“ƒOƒ‚ƒWƒ…پ[ƒ‹پ^ƒGƒAƒچƒbƒN‚ضچs‚«—ˆ‚·‚邽‚ك‚جڈo“ü‚èŒû‚à‚±‚±‚ة‚ ‚è‚ـ‚·پB
ƒچƒڈپ[ƒfƒbƒL‚حپAٹ·‹C—p‚جƒtƒ@ƒ“پA—¬‘جƒ|ƒ“ƒvپAƒSƒ~‘ـ‚ب‚ا‚ھ”z’u‚³‚ê‚ؤ‚¢‚ـ‚·پB‹@ٹي‚â”zٹا‚ھ‚¬‚ء‚µ‚è‹l‚ـ‚ء‚ؤ‚¢‚邽‚كپAƒNƒ‹پ[‚ھ‚±‚ج’†‚ة“ü‚邱‚ئ‚ح‚ ‚è‚ـ‚¹‚ٌپB
ƒچƒ{ƒbƒgƒAپ[ƒ€‚حپA’·‚³–ٌ15mپA’¼Œa–ٌ38cmپAڈd‚³‚ح–ٌ410kg‚ ‚èپA’تڈيƒyƒCƒچپ[ƒhƒxƒCپi‰ف•¨ژ؛پj‚جچ¶Œ½‚ةژو‚è•t‚¯‚ç‚ê‚ؤ‚¢‚ـ‚·پB
پ@–ٌ30ƒgƒ“‚ـ‚إ‚ج‰×•¨‚ً“®‚©‚·‚±‚ئ‚ھ‚إ‚«پAگlچH‰qگ¯‚ب‚ا‚جƒyƒCƒچپ[ƒhپi‰×•¨پj‚ً•ْڈoپA‰ٌژû‚·‚éژ‚ةژg—p‚·‚é‚à‚ج‚إ‚·پB‘DٹOٹˆ“®‚ًچs‚¤‰F’ˆ”ٍچsژm‚ج‘«‚ًƒچƒ{ƒbƒgƒAپ[ƒ€‚جگو‚ةŒإ’肵‚ؤ‘DٹOٹˆ“®‚ًƒTƒ|پ[ƒg‚·‚éژ–‚à‚ ‚è‚ـ‚·پB
ƒچƒ{ƒbƒgƒAپ[ƒ€‚حپAƒNƒ‹پ[‚ھƒtƒ‰ƒCƒgƒfƒbƒL‚ج‘‹‰z‚µ‚ةپA‚ـ‚½‚حگê—p‚جƒ‚ƒjƒ^ƒeƒŒƒr‚ًŒ©‚ب‚ھ‚ç‘€چى‚µ‚ـ‚·پB
ژل“c‰F’ˆ”ٍچsژm‚حپA1996”N1Œژ‚جƒXƒyپ[ƒXƒVƒƒƒgƒ‹STS-72ƒ~ƒbƒVƒ‡ƒ“‚إپA‚±‚جƒچƒ{ƒbƒgƒAپ[ƒ€‚ً‘€چى‚µ‚ؤ“ْ–{‚جپu‰F’ˆژہŒ±پEٹد‘ھƒtƒٹپ[ƒtƒ‰ƒCƒ„پ[(SFU)پv‚ًŒ©ژ–‰ٌژû‚µ‚ـ‚µ‚½پB |
|
| چإڈIچXگV“ْپF1998”N11Œژ30“ْ |
|