| (1) | (2) |
| 1997年12月3日(日本時間)第2回船外活動 |
|
自律型船外ロボットカメラ(RME1323 AERCam/Sprint) | ||||||||
|
| |||||||||
|
第2回船外活動直前の土井MS | ||||||||
|
| |||||||||
|
第2回船外活動直前の土井MSとスコットMS | ||||||||
|
| |||||||||
|
| ||||||||
|
| |||||||||
|
EVAクレーンを設置する土井MS(奥)とスコットMS(手前) | ||||||||
|
| |||||||||
|
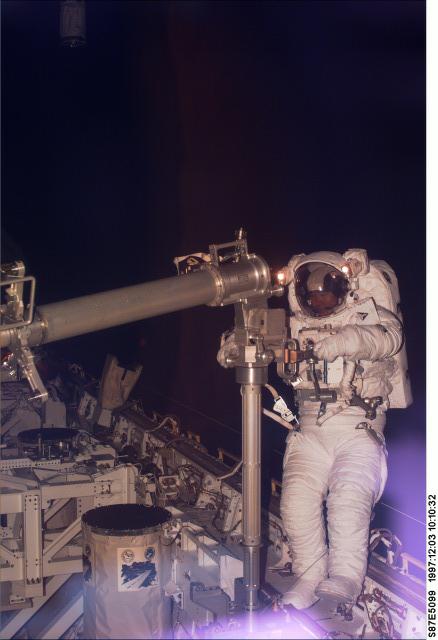
EVAクレーンの操作準備をする土井MS | ||||||||
|
| |||||||||
 |
| ||||||||
|
| |||||||||
 |
| ||||||||
|
| |||||||||
 |
| ||||||||
|
| |||||||||
|
EVAクレーンを収納する土井MS | ||||||||
|
| |||||||||
 |
| ||||||||
|
| |||||||||
|
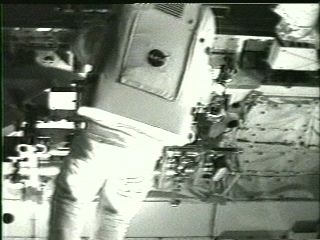
Sprintを放出するスコットMS | ||||||||
|
| |||||||||
|
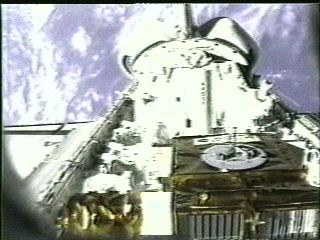
ペイロードベイ(貨物室)に浮かぶSprint | ||||||||
|
| |||||||||
 |
| ||||||||
|
| |||||||||
 |
| ||||||||
|
| |||||||||
 |
パワーツールの操作性評価を行う土井MS (Sprintの映像) |
||||||||
|
| |||||||||
|
Sprintを回収するスコットMS | ||||||||
Last Updated : 1997.12. 8