
�@���ۉF���X�e�[�V���� (ISS) �ƃX�y�[�X�V���g���̃����f�u�̓X�y�[�X�V���g���ŏグ�̎��_����n�܂��Ă���A�ŏグ����48���Ԃ̊ԁA�����f�u�̂��߂̐���̋O�����䂪�X�y�[�X�V���g���ōs���AISS�̋O���ɏ��X�ɐڋ߂��܂��B
�@��s3���ڂ̃X�y�[�X�V���g���ɂ��ISS�ւ̍ŏI�ڋ߂́A�D���̎蓮���c�ɂ���čs���܂��B�����ISS��600�t�B�[�g(��183m)���̕��i�n�������j�����Ɍ������Đڋ߂��A���O��ISS�̎��͂����Ȃ���ISS�̏�։�荞�݁AISS�̏ォ��h�b�L���O�̂��߂̐ڋ߂��s�����@(-R-Bar�܂���radius
vector(���a�����̃x�N�g��)�ƌĂԕ��@)�ōs���܂��B
�@�X�y�[�X�V���g����ISS�Ǝ��ߋ����܂Őڋ߂���ƁA�Ō�Ɍy���X���X�^�[�˂����āA�X�y�[�X�V���g���̃h�b�L���O���u��ISS��PMA-2(�^�������A�_�v�^�[2)�����������܂��B
 |
�����f�u�̌�����R-Bar�ɂ��ڋߕ��@ |
-
 |
�����f�u�̊�{���� |
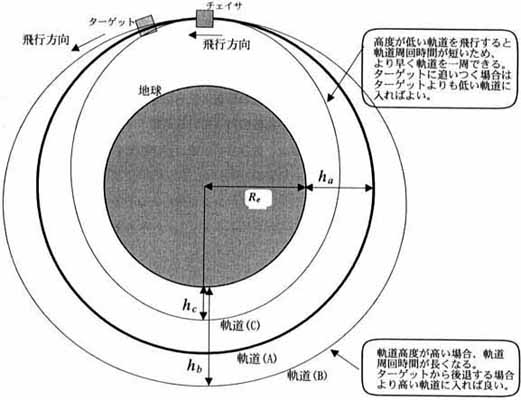
�@���}�́A�O����̉F���@�̃����f�u�O����͎��I�ɕ\�������ł��B
�@���}�ŁA�^�[�Q�b�g(�ڕW)��ISS�A�`�F�C�T�i�ǐՂ��鑤�j�͂����ǂ������ċO���ύX���s���X�y�[�X�V���g���ƍl���ĉ������B
�@���҂�����̋O���ł���ꍇ�ɂ́A���F���@�͏�Ɉ��̋�����ۂ����܂܁A��s���܂��B���̂Ƃ��A�^�[�Q�b�g�ɒǂ������߂ɁA�`�F�C�T����s���x���グ��ƁA���҂͈ꎞ�I�ɂ͋߂Â��܂����A��s���x���������߁A�`�F�C�T�̋O�����a���傫���Ȃ�A�ӂɔ����ă^�[�Q�b�g���牓�������Ă��܂��܂��B
�@���Ȃ킿�A�^�[�Q�b�g���猩��ƃ`�F�C�T��������ɂ���Ă䂭�悤�Ɍ����܂��B�]���āA�^�[�Q�b�g�Ƀ`�F�C�T���ڋ߂���悤�ɂ��邽�߂ɂ́A�t�ɑ��x�𗎂Ƃ��ċO�����a�����������ċO��������Z�����邱�Ƃ��K�v�ł��B���̏ꍇ�A�`�F�C�T�͈�U�A�^�[�Q�b�g���牓������܂����A�O���������Z�����߂Ɏ���Ƀ^�[�Q�b�g�ɐڋ߂��邱�ƂɂȂ�܂��B���̌�A�ēx�A���x�����ă^�[�Q�b�g�Ɠ����O���ɖ߂�܂��B���ꂪ�A�����f�u�̊�{�����ł���A�X�y�[�X�V���g���͑ŏグ����3���ڂ܂ł́A���̂悤�ȋO��������s���ď��X��ISS�̋O���ɋ߂Â��܂��B
�����f�u�̌����̊T�������}
|
ISS�ւ̍ŏI�ڋ� |
�@��q�����悤�ȃ����f�u���@(V-Bar�܂���velocity vector(���x�x�N�g��)�ƌĂт܂�)�ł��^�[�Q�b�g�ɍŏI�ڋ߂��邱�Ƃ͉\�ł���A����̉F���X�e�[�V�����̑g���~�b�V�����ł��g�p�����\��ł����A����̃~�b�V�����ł̓��V�A�̒n��ǂƂ̒ʐM�����N���m�ۂ���W������-R-Bar�����Őڋ߂��s���܂��BR-Bar�́A�ڋߎ��̃X���X�^������~����Ύ��R�Ƀu���[�L��������Ƃ��������������Ă���A�X�y�[�X�V���g���ƃ~�[���̃h�b�L���O�~�b�V�������Ȃǂɂ��g��ꂽ�����ł��B
�@R-Bar�����́A�^�[�Q�b�g(ISS)�̉�����i�n�������j����A�X�y�[�X�V���g���̒n�������̃X���X�^�˂��ď㏸�����邱�Ƃɂ��O�����a���������Âω������āA�^�[�Q�b�g(ISS)�̕��ɐڋ߂�����@�ł��B
| �ŏI�X�V���F2000�N 9�� 6�� |
|


