エンデバー号は貨物室と船室(ミッドデッキ)に荷物を搭載してISSへ運びます。UF2フライト(STS-111)で搭載するペイロード(搭載物)で主要なものは次のとおりです。これらはすべて貨物室に搭載されています。
 |  |
| MPLM(レオナルド)(7A.1) | レオナルドとISS結合図(7A.1) |
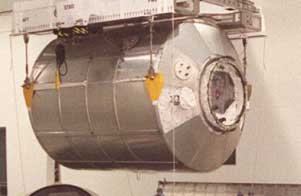
多目的補給モジュール(Multi-purpose Logistics Module: MPLM)は、イタリア宇宙機関(ASI)が開発した与圧補給品を国際宇宙ステーション(ISS)へ運ぶ輸送モジュールで、3機開発されています。それぞれ「レオナルド」、「ラファエロ」、「ドナテロ」という愛称が付けられています。今回飛行するのは、1号機の「レオナルド」で、2001年3月の5A.1、2001年8月の7A.1に続いて3回目の飛行になります。MPLMとしては5回目の飛行です。
MPLMはスペースシャトルの貨物室に乗せて打上げ、ロボットアームでISSの共通結合機構(Common berthing mechanism: CBM)に結合して、クルーが荷物を搬入出します。
全長約6.7m、外部直径約4.5m、容積76.4立方メートル、重量約4トン、最大5tの貨物を搭載することができます。ハッチが1.3m×1.3mと広いので大きな荷物を取り扱うことが出来、スペースシャトルから直接ISSに搬入するよりも作業がし易くなりました。作業終了後は、CBM結合を外して再びスペースシャトルの貨物室に積み込み地球へ帰還します。
MPLMは、25回の飛行が可能な設計となっており、年間数回のミッションが予定されています。
MPLM内には、最大16台のラックを搭載することができます。
搭載ラック概要
UF2フライトでは、MPLMに補給品保管ラック(Resupply Stowage Rack: RSR) 8台、補給品保管プラットフォーム(Resupply
Stowage Platform: RSP) 5台、国際標準実験ラック(International Standard Payload Rack: ISPR)
2台(MSG、EXPRESS-3)の計15台のラックが搭載され、このうち、ISPR 2台がISS内へ搬入されます。
なお、帰還時にはISSからゼロg保管ラック(Zero-g
Stowage Rack: ZSR)2台が回収されます。
MPLM内にはクルーが運び出しやすいように、保管ラックおよび保管プラットフォーム用収納バッグに収めた各種機器を搭載して打ち上げられます。内部の機器や補給品のみがISS内に搬入され、収納バッグはそのまま地球に戻されます。
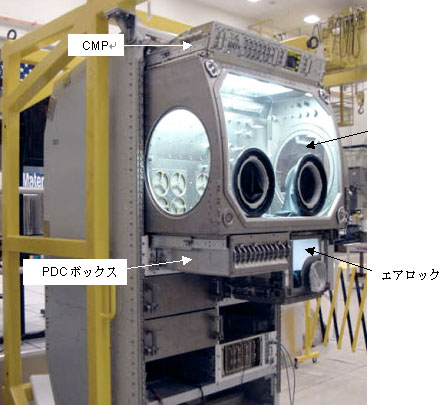
- EXPRESS-3ラック
 |
| MEPS | EXPRESSは実験ラックの一種で、実験の準備作業を軽減するために開発されたもので、すでに4台のラックがISSに搬入されています。今回搬入するEXPRESS-3ラックにはマイクロカプセル静電処理システム(MEPS)という実験装置を搭載して打ち上げます。
MEPSは、薬液を封入した多層構造のマイクロカプセルを微小重力環境で大量に製造するプロセスを開発する実験装置です。
 |
モービル・ベース・システム(Mobile Base System: MBS) |
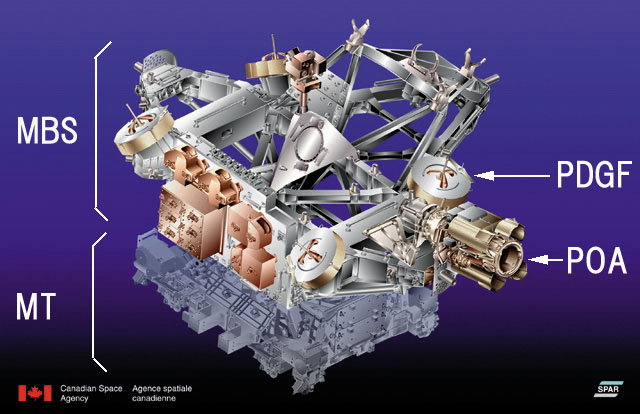
モービル・ベース・システム(Mobile Base System: MBS)はISSのトラス上を移動して機材を輸送するロボットアームシステム(Mobile
Servicing System: MSS)の一部です。大きさは5.7m × 4.5m × 2.9mで重量は1,450kg、最大20,900kgまでの機材を輸送できます。ISSのロボットアームにより、4月に飛行した8Aフライトで打ち上げた台座部分(Mobile
Transporter: MT)に取り付けられ、さらに船外活動によりMTとの結合作業がおこなわれます。
MBSには「カナダアーム2」(ISSのロボットアーム)を取り付ける台座の役割を果たすPDGF(Power Data Grapple Fixture)と呼ばれる装置が予め4個取り付けてあります。(PDGFについては下記を参照)。カナダアーム2は現在「デスティニー」(米国実験棟)に取り付けてありますが、MBSのPDGFをカナダアーム2で把持してからデスティニー側を開放することにより、カナダアーム2はMBSに移動できます。PDGFから電力・データ通信・ビデオ信号伝送の機能が提供され、カナダアーム2はMBS上での活動を開始します。
カナダアーム2はUF2フライトが終了した後に、MBSへ移動する予定です。
 |
| MBS(Mobile Base System) |
また、MSSがレール上を移動する際に機材を一時的に把持するPOA(Payload/ORU Accommodation)と呼ばれる装置も装備されています。POAの先端はカナダアーム2と共通の把持機構で、これはカナダアーム2の把持機構の予備品としての役割もあります。
|
パワーデータ・グラプル・フィクスチャ(PDGF) |
 |
| PDGF | |
(c) CSA |
パワーデータ・グラプル・フィクスチャ(PDGF)はISS共通の装置です。上記のMBSの説明に記述したものも同じ仲間です。PDGFはこれを把持することにより、機械的に結合するとともに、電力を供給したり、電気信号や映像を中継できるようにする装置です。UF2フライトではMBSのPDGFとは別のものを、船外活動によりエンデバー号の貨物室から取り出して、P6トラスに取り付けます。将来のミッションで、P6トラスを移設する予定ですが、その際にカナダアーム2でこのPDGF
を把持することになっています。
|
サービスモジュール・デブリ・パネル(SMDP) |
サービスモジュール・デブリ・パネル(Servicw Module Debris Panel: SMDP)は宇宙のゴミと言われるデブリの衝突から「ズヴェズダ」(ロシアのサービスモジュール)を保護するためのパネルです。アルミニウムシートでできており、グラスファイバの板と布で覆われています。
今回のUF2フライトでは6枚のパネルが打ち上げられ、船外活動により「ユニティ」(与圧結合モジュール)と「ザーリャ」(基本機能モジュール)を接続する与圧結合アダプタ(Pressurized
Mating Adapter1: PMA1)に仮置きされます。
7月末に予定しているISSをベースとする船外活動でズヴェズダの外壁に取り付ける予定です。ズヴェズダのデブリパネルは複数回に分けて打ち上げる予定で、今回はその1回目です。
|
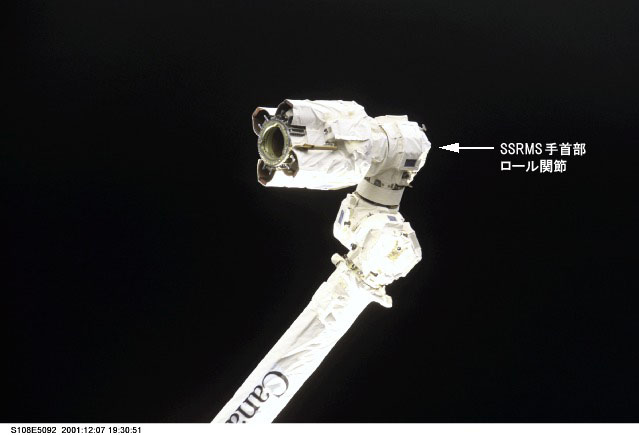
ISSロボットアーム手首部ロール関節 |
 |  |
| SSRMS手首部ロール関節 |
2002年3月にカナダアーム2を主系で操作中に、手首部のロール関節のブレーキが解除出来なくなるという障害が発生しました。冗長系に切り替えたところ正常であったため主系の制御回路の断線かショートが原因と想定されました。このため今回のフライトでこの関節部を交換することになったものです。
最終更新日:2002年5月28日
|