「きぼう」日本実験棟の構成 -船外実験プラットフォーム-
 船外実験プラットフォームの目的 船外実験プラットフォームの目的
船外実験プラットフォームは、宇宙での実験の大きな特徴である微小重力、高真空、空間などの宇宙曝露環境を利用して、科学観測、地球観測、通信、理工学実験および材料実験などを実施することができる多目的実験スペースです。
国際宇宙ステーション(ISS)で曝露実験が可能なのは、「きぼう」日本実験棟とトラスだけであり、多くの研究者の注目を集めています。
船外実験プラットフォームは我が国独自の活動に有利に利用されるとともに、国際協力の場としても利用される計画です。
このように「きぼう」の船外実験プラットフォームは、次世代へ向けた科学技術の発展へ貢献するとともに、世界的な協力関係の維持・促進が期待されています。
船外実験プラットフォームの概要
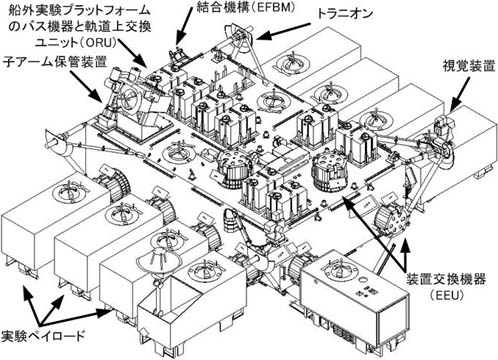
船外実験プラットフォームは下図に示すような形状をしています。
船外実験プラットフォームの大きさは、およそ6m×5m×4mで、重量は約4000kg(打上げ時)です。船外実験プラットフォーム実験ペイロードを交換することで、いろいろな実験を行うことができます。船外実験プラットフォームは、軌道上で10年間利用され、実験に必要な電力を供給したり、装置を冷却するための冷媒を循環させたり、実験データを収集したりすることで、船外実験プラットフォーム実験ペイロードで実施される曝露実験のサポートを行います。
船外実験プラットフォームは、船外実験プラットフォーム結合機構(EFBM)を介して船内実験室と結合して運用されます。そして、装置交換機構(EEU)を介して最大10個の船外実験プラットフォーム実験ペイロードを周囲に取り付けたり、船外パレットや「きぼう」の衛星間通信システム(ICS)を取り付けることができます。
標準的なペイロードとして、大きさ 1.85m×1.0m×0.8mで、重量は500kg程度のものを想定しています。
|
| 船外実験プラットフォーム |
船外実験プラットフォームの構成品
- 船外実験プラットフォームのバス機器と軌道上交換ユニット(ORU)
ORU自体の意味は、船内/船外活動により、軌道上で交換することが可能なように設計されている要素を示します。電力系、通信・制御系、熱制御系など、船外実験プラットフォームを運用するためのバス機器は故障時などに交換が可能なようにORU化されています。船外実験プラットフォームのORUの一部は、船外活動で交換可能であると同時に、ロボットアームによる交換も可能なように設計されています。
- 子アーム保管装置
「きぼう」のロボットアームは、船外実験プラットフォーム実験ペイロードなどを交換する親アームと、ORUなどを交換する子アームの2種類があります。子アームは、親アームの先端に取り付けられて使用されますが、未使用時には、船外実験プラットフォームの上に保管されます。
- 船外実験プラットフォーム実験ペイロード
曝露環境を利用した実験を行う装置が搭載されています。EEUにより船外実験プラットフォームに結合されます。本図は、10個の船外実験プラットフォーム実験ペイロードを搭載した場合の想像図です。
- 船外実験プラットフォーム結合機構
「きぼう」の船内実験室と船外実験プラットフォームを結合する機構。取付と同時に電力系、通信制御系、熱制御系(冷媒)が接続されます。
- トラニオン
スペースシャトルのペイロードベイ(貨物室)に船外実験プラットフォームを搭載する際の固定部です。
- 船外実験プラットフォーム視覚装置
TVカメラと照明。船外実験プラットフォーム実験ペイロードやORUの交換時のロボットアーム操作のための視野を提供します。
- 船外実験プラットフォーム装置交換機構(EEU)
船外実験プラットフォーム実験ペイロードを取り付けるための機構で、取付と同時に、電力系、通信制御系、熱制御系(冷却液)が接続されます。船外実験プラットフォーム実験ペイロードは、EEUに取り付けられた状態で、運用されます。
EEUにより船外実験プラットフォーム実験ペイロードが交換できるため、従来の衛星とは異なり、いろいろな実験を行うことができると共に、将来の技術の進歩にも柔軟に対応していけるようになっています。
開発と検証
船外実験プラットフォームシステムの開発は、エンジニアリングモデル→プロトフライトモデル方式を採用しています。
船外実験プラットフォームは、エンジニアリングモデルによる試験を終了し、現在はプロトフライトモデルの試験を行っています。
エンジニアリングモデルで実施された主な試験の写真を以下に示します。
| NO.1 |
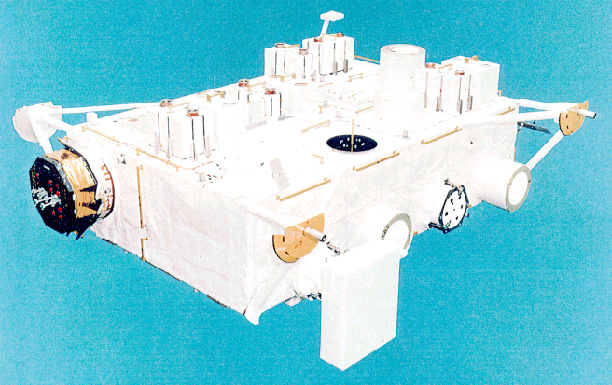
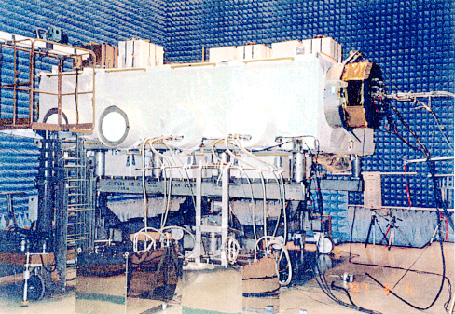
船外実験プラットフォームエンジニアリングモデル(EM)システム外観写真 |
 |
この写真は,船外実験プラットフォームエンジニアリングモデルの外観写真です。試験の目的が達成できる範囲で一部の機器を開発基礎試験で製作したものを活用したり、宇宙用でない汎用の部品/材料を使用したりしてコストを低減化しています。 |
| NO.2 |
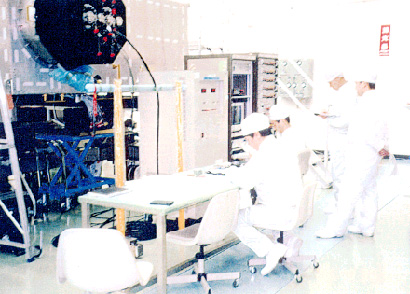
船外実験プラットフォームエンジニアリングモデル(EM)システム機能・性能試験 |

 |
機能・性能試験は、船外実験プラットフォームシステムが電気的、機械的要求を満足することを検証するための試験です。 |
| NO.3 |
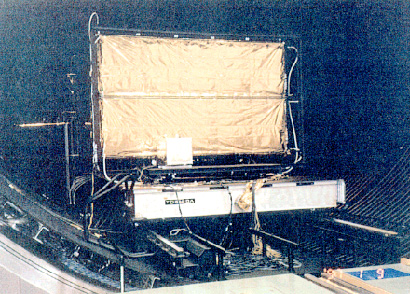
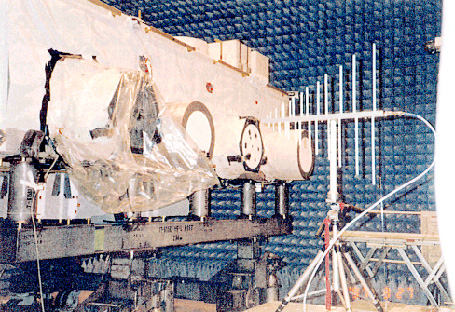
船外実験プラットフォームエンジニアリングモデル(EM)システム熱真空試験 |

 |
システム熱真空試験は、船外実験プラットフォームシステム全体が、運用中に想定される熱真空環境に対して、規定の性能を満足することを確認するための試験です。
この試験は、宇宙空間と同じ様な熱的環境や真空環境を模擬することのできる熱真空チャンバを用いて実施されました。 |
| NO.4 |
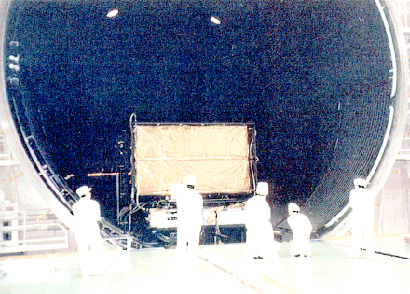
船外実験プラットフォームエンジニアリングモデル(EM)電磁適合性試験 |

 |
電磁適合性試験は、船外実験プラットフォームシステムを構成する機器相互間や、外部の電気機器間の電磁干渉特性が要求を満足することを確認するために実施します。 |
| NO.5 |
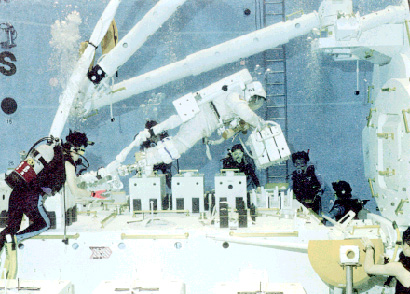
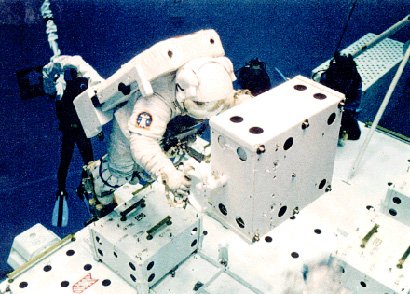
船外活動(EVA)無重量シミュレーション試験 |

 |
EVA無重量シミュレーション試験は、水中における中性浮力を利用することにより、無重量を模擬し、船外活動をシミュレーションする試験です。船外活動での作業性を確認するために実施します。
写真は、ORUを交換しているところです。 |
船外実験プラットフォームの主要仕様
| 項目 |
船外実験プラットフォーム |
| 外形 |
箱形 |
| 幅 |
5.0m |
| 高さ |
4.0m |
| 長さ |
5.6m |
| 乾燥重量 |
4.1t |
| 搭載実験ラック |
船外実験装置10個 |
| 電力 |
最大 24kw 120V (直流) |
| 通信制御 |
32ビット計算機システム、高速データ伝送最大95Mbps |
| 環境制御性能 |
無し |
| 寿命 |
10年以上 |
最終更新日:2003年6月2日
|