STS-112ミッションで搭載するペイロード(搭載物)のうち主要なものは次のとおりです。
貨物室に搭載するもの
 | S1トラス |
国際宇宙ステーション(ISS)の完成時には、進行方向に対して直角で横の方向に、トラスと呼ばれる長さ約91mにもなる梁(はり)が取り付けられ、このトラスに太陽電池パドルなどが取り付けられます。
S1トラスはISSのS0トラスの右舷に取り付けられるトラスです。S1トラスの長さは約13.7m(45ft)、高さは約4.6m(15ft)、奥行き(ISS取り付け後の進行方向)は約1.8m(6ft)、重量は12,556kg(P1トラスは13,984kg)です。
S1トラスには外部能動熱制御系機器(EATCS:
External Active Thermal Control System)用の展開式ラジエータと冷媒を保管・循環させる装置の他、EVA時の支援装置となるCETAカートA、電力系機器やデータ処理系の機器などが装備されています。
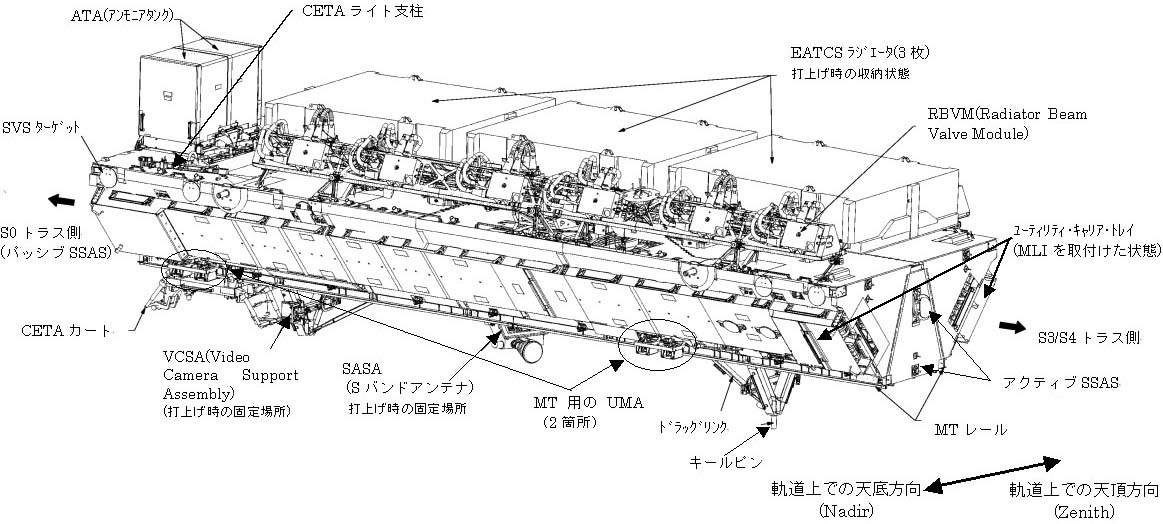
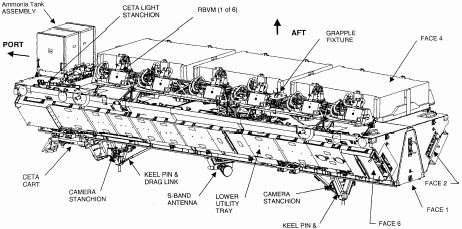 | S1トラス打上時の外観 |
EATCSは、現在P6トラスで使われているEEATCS(Early EATCS)の代わりとなるもので、12A.1ミッションでS1トラスとP1トラスのEATCSを起動し、P6トラスのEEATCSを停止し交代する予定です。
EATCSが起動されると、ロシア側を除く全ての与圧モジュール(「きぼう」日本実験棟とコロンバスモジュールを含む)からの排熱を集めて、宇宙空間に放射します。またトラス上に取り付けられた曝露機器(MBSU(Main
Bus Switching Unit)やDDCU(直流変圧器))のコールドプレートと呼ばれる内部に水を循環させた板からも余分な熱を収集します。
S1トラスに装備されているEATCSは、低温系熱交換機(LT
IFHX: Low Temperature Interface Heat Exchanger)からの排熱を収集します。
S1トラスの機構
S1トラスには次の機構が装備されています。
- SSAS(Segment-to-Segment Attachment System)
S1トラスは、9AフライトでS0トラスと結合し、13AフライトでS3/S4トラスが結合します。これらのトラス同士を遠隔操作して結合させる機構として、このSSASが使用されます。SSASにはアクティブ側とパッシブ側の2種類があり、S3/S4トラスと結合する側のSSASはアクティブ側、S0トラスと結合する側のSSASはパッシブ側です。アクティブ側はモータ駆動ボルト(MBA)が4カ所(精位置決め機構を含む)、統合モータ制御装置(IMCA)により作動する把持ラッチが1カ所、粗位置決め機構(アラインメントガイド)が3カ所、結合準備完了指示(RTL)センサが3カ所あります。パッシブ側には把持ラッチに対応するラッチが把持するラッチ用バーがあります。
SSASの結合は、まず、把持ラッチでパッシブ側のラッチ用バーを引き寄せ、トラス同士の位置を合わせます。その後、4カ所のボルトで結合されます。このボルトの受け側となるナットは、1カ所は構造的に固定されていますが、残りの3カ所は熱による構造の収縮を考慮して多少の自由度を有しています。なお、構造結合が完了すると把持ラッチは解除されます。
把持ラッチも駆動ボルトも遠隔操作できない場合は、EVAによるバックアップ方法で動作させることが出来ます。
- 把持ラッチアセンブリ(CLA:
Capture Latch Assembly)
SSASを仮結合する際に使われる機構で、パッシブ側(把持バー)を引き寄せ、全方向に±3インチの位置合わせをする役割を果たします。2個のIMCA(Integrated
Motor Controller Assembly)でラッチの爪を開閉します。この把持ラッチは、モータ駆動ボルトアセンブリ(MBA: Motorized Bolt
Assembly)のボルトでトラス同士を構造結合するまでの間使用され、MBAによる構造結合が完了した後は、CLAの把持は解除されます。この機構は、これまでにモジュール-トラス間結合システム(MTSAS:
Module-To-Truss Structure Attach System)で使われた実績があります。
- モータ駆動ボルトアセンブリ(MBA:
Motorized Bolt Assembly)
アクティブ側のSSASの四隅にはMBAが各1基設置されています。MBAは精アライメント(Shear
corn)のすぐ後ろ(奥側)に設置されています。MBAはモータで駆動するボルトを回転させてパッシブ側のナットと結合し、トラス同士を構造的に結合する機構です。MBAは2基のBBC(Bolt
Bus Controller)のうちの1基により制御されます。
- 結合準備完了指示(RTL:
Ready To Latch)センサー
アクティブ側のSSASには、トラス結合作業の準備が整ったことを確認するRTLセンサーが3基設置されています。パッシブ側には、結合時にこれに対応するRTLストライカープレートが3基設置されています。
このRTLセンサーは船内活動クルーに結合準備が完了した事を知らせるために使われます。3基のRTLセンサーは、それぞれ粗位置決め機構(course
alignment pin/cone)のすぐ側に設置されています。
外部能動熱制御系機器(EATCS:
External Active Thermal Control System)ラジエータ機構
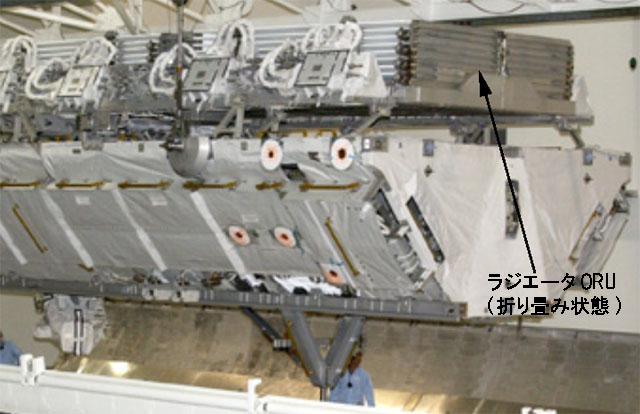
S1、P1トラスセグメントに装備された2つのEATCSループは、それぞれ3つのラジエータORUから構成される排熱用のラジエータ・ウイング1基を持っています。S1トラスのラジエータORUは、35kWの熱を宇宙空間に放出することができます。ラジエータ展開時の長さは約22.8m(74.8ft)です。
3つのラジエータORUは、ラジエータを適切な角度に回転させ排熱を最適化させるための機構である放熱ラジエータ回転関節部(TRRJ:
Thermal Radiator Rotary Joint)に取り付けられています。
各ラジエータORUは、8枚のラジエータパネル、6個のSFU(Squib
Firing Unit)、SFUのファームウエアコントローラ、ラジエータORUの展開/収納用の駆動モータである統合モータ制御装置(IMCA: Integrated
Motor Controller Assembly)1基、着脱コネクター(QD)から構成されています。各ラジエータORUは、打上げ時には折り畳まれて6個の帯状の固定具で固定されています。軌道上では、このラジエータORUは展開/収納が可能です。6個のSFUは、ラジエータORUの初期展開時に固定具機構を開放するために使われます。
IMCAは、1基しかないため、故障した場合はEVAでピストル型パワーツール(PGT:
Pistol Grip Tool)を使って展開/収納をおこないます。
CETAカート
9Aフライトでは最初のEVAクルーおよび機器移動補助用のCETA(Crew and Equipment Translation Aid )カートAがS1トラスに固定された状態で打ち上げられます。重量は約282kgです。CETAカートは、トラスの台車(MT:
Mobile Transporter)レール上を移動し、様々な作業場所にEVAクルーやEVA工具およびORUなどを運搬したり、作業プラットフォームの役割を果たします。CETAカートは単独で使用する場合はEVAクルーがCETAカートの移動用足場(TFR:
Translational Foot restraint)に足を固定した状態で、手の力だけを使って移動します。また、MTと結合してMTの動力で移動させることもできます。CETAカートには、2個のブレーキ(移動時に使うダイナミック・ブレーキと停止後の固定に使うパーキングブレーキ)があり、移動方向の前後にそれぞれ2個装備しています。
CETA上のORUグリッドは、ORUを仮置きするために使われます。また、持ち運び可能な足場(APFR:
Articulating Portable Foot Restraint)、移動用足場(TFR)、米国のEVAクレーン(OTD: ORU Transfer
Device)、工具取り付け支柱(Tool Stanchion)を取り付けるために、5箇所に足場の取り付け器具(WIF: Worksite Interface)が設置されています。
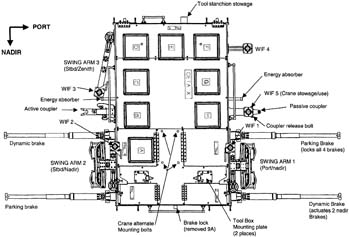 | | CETAカート(工具移設前のCETAカートのみ) | CETAカート |
その他の機器
S1トラスには、外部能動熱制御系機器(EATCS)の他に以下のような機器が設置されています。- 電力系機器
- データ処理システム機器
- Sバンド通信システム
- 加速度計
4基
- VCSA(Video Camera Support Assembly)支柱 2基
 | Sバンド通信システム |
S1トラスには2系統目のSバンド通信システムが搭載されており、String-1またはS-Band-Sと呼ばれています。このシステムには、Sバンドアンテナ支持装置(SASA:
S-band Antenna Support Assembly)、トランスポンダー(中継器)、基準信号処理装置(BSP: Baseband Signal Processor)が含まれています。
これらのシステムが使用可能になれば、ISSのSバンドシステムは冗長系を確保できるようになります。
9Aフライトでは、UF2フライトでMPLMに搭載してISSに運ばれた2基の外部TVカメラ(ETVCG:
External TV Camera Group)を9Aで運んだビデオカメラ設置用の支柱(VCSA: Video Camera Support Assembly)に取り付けてS1トラスに設置する予定です。
外部TVカメラは、VCSAとETVCG
ORU(雲台、ビデオカメラ、照明アセンブリ)から構成されます。これらの外部TVカメラは、今後の組立作業時の船外のTV映像を撮影するために使われます。
2基のVCSAは、S1トラスのキールピン(スペースシャトル貨物室の底に固定するピン)に固定されて打ち上げられ、EVA時にS1トラスの左舷に移設されます。ETVCG
ORUは、このVCSA支柱の上部に取り付けられます。ETVCG ORUは、EVA開始前に船内で組み立てられて、エアロックから外に持ち出されます。
最終更新日:2002年10月11日
|