| 第1回船外活動(飛行4日目) |
| 開始時刻 | 4月11日午前
9時36分(日本時間 4月11日午後11時36分) |
| 終了時刻 | 4月11日午後
5時24分(日本時間 4月12日午前 7時24分) |
| 作業時間 | 7時間48分 |
| 作業者 | スティーブン・スミス、レックス・ウォルハイム |
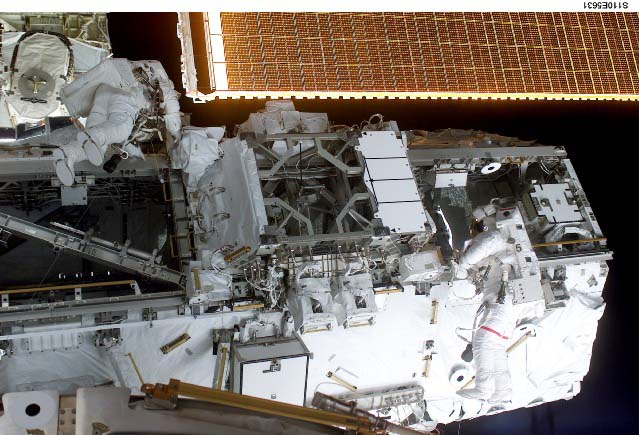
| 主要作業内容 | 初めて「カナダアーム2」(ISSのロボットアーム)を使用して実施したISS組立作業でS0トラスを「デスティニー」(米国実験棟)に取り付けた後、次の作業を実施した。
1.S0トラスの前方と後方に2基づつ取り付けるMTSストラット(支柱)のうち前方の2基の取付け
2.S0後方のアビオニクストレイの展開と配線の接続
3.S0前方アビオニクス・アンビリカル・トレイ2基のS0トラスからの取り出しとデスティニー上部の右舷側、左舷側への取付け、配線・配管接続
4.TUSケーブルの「モービル・トランスポータ」(MT:ISSロボットアームの台車)への接続 |
| 第2回船外活動(飛行6日目) |
| 開始時刻 | 4月13日午前
9時 9分(日本時間 4月13日午後11時 9分) |
| 終了時刻 | 4月13日午後
4時39分(日本時間 4月14日午前 7時30分) |
| 作業時間 | 7時間30分 |
| 作業者 | ジェリー・ロス、リー・モーリン |
| 主要作業内容 | 1.S0トラスの後方MTSストラット2基の取付け
2.S0トラスのドラッグリンクとキールフレームの取外し(各2ヶ所)
3.2個目のTUS2ケーブルのMTへの接続
4.第3回船外活動の作業に備え、Z1トラスに保管してあったPFR(移動可能な足場)の移動 |
| 第3回船外活動(飛行7日目) |
| 開始時刻 | 4月14日午前
8時48分(日本時間 4月14日午後10時48分) |
| 終了時刻 | 4月14日午後
3時15分(日本時間 4月15日午前 5時15分) |
| 作業時間 | 6時間27分 |
| 作業者 | スティーブン・スミス、レックス・ウォルハイム |
| 主要作業内容 | 1.デスティニー上のLCA(S0トラス取付け台座)の把持ラッチ(カニの爪形のラッチ)の解除
2.デスティニーのデブリシールドの下の配線の接続変更
3.「モービル・トランスポータ」(MT:ISSロボットアームの台車)のロンチロック(打上げ時の固定器具)の取外しと断熱カバーの取外し
4.CID(電力線のブレーカ)2個の取付け
5.アトランティス号の貨物室からの船外活動用工具の「ユニティ」(結合モジュール1)への移動 |
| 第4回船外活動(飛行9日目) |
| 開始時刻 | 4月16日午前
9時29分(日本時間 4月16日午後11時29分) |
| 終了時刻 | 4月16日午後
4時 6分(日本時間 4月17日午前 6時 6分) |
| 作業時間 | 6時間37分 |
| 作業者 | ジェリー・ロス、リー・モーリン |
| 主要作業内容 | 1.S0トラス両端にあるSSASのRTLスイッチの動作確認
2.エアロックスパー(S0トラスとエアロックを最短距離で結ぶ支柱のようなもの)の固定解除・展開
3.作業用投光器2個の設置
4.MTへの衝撃吸収機構の取り付け
5.ポータブル・ワーク・プラットフォーム(PWP)の整備
6.MT上面のモービル・ベース・システム(MBS)取り付け用のボルトカバー4個の取り外し
7.EV-CPDS(ISS外部の放射線環境測定装置)の展開
8,S0へのハンドレール5個の取り付け
9.GPS#2のアンテナの断熱カバーの取付け位置修正
10.今後(UF2)の船外活動に備えての工具の移動
11.TGA(微量ガス検出器)の試験 |