STS-100では国際宇宙ステーション(ISS:International Space
Station)に、カナダが製作したISS用のロボットアーム(SSRMS:Space Station Remote Manipulator System)、通信用のUHFアンテナ、イタリアが製作した多目的補給モジュール(MPLM:Multipurpose
Logistic Module)ラファエロを輸送します。ラファエロには2基の実験装置収納ラック(EXPRESS:Expediting the Process
of Experiments to the Space Stationラック)、4基の補給品収納プラットフォーム(RSP:Resupply Stowage
Platform)、4基の補給品収納ラック(RSR:Resupply Stowage Rack)が搭載されています。SSRMSとUHFアンテナは輸送用キャリア(SLP:Spacelab
pallet)に折り畳まれた状態で、そしてラファエロはスペースシャトルの貨物室にそのまま搭載します。
STS-100ペイロードベイ(貨物室)の搭載状況 |
 | 輸送用キャリア(SLP:Spacelab
Pallet) | これはスペースシャトルの貨物室(ペイロードベイ)に機器を搭載するためのU字形の輸送台です。これまでに、スペースラブミッションで使われた他、STS-99のSRTM(Shuttle
Radar Topography Mission)を搭載したり、STS-92で与圧結合機構(PMA-3)をISSに運搬した際に使われています。
| 宇宙ステーション用ロボットアーム(SSRMS:Space
Station Remote Manipulator System) |
宇宙ステーション用ロボットアーム(SSRMS) | SSRMSは、ISSに取り付けて使用するロボットアームであり、カナダが開発しました。この新しいアームは、ISSの組立作業や修理作業などで、スペースシャトルのロボットアームが届かない場所での作業やスペースシャトルが帰還した後のISS単独での修理作業時に使用します。
SSRMSは全長が17mあり、スペースシャトルで打ち上げる際は2本の腕の部分をさらに半分に折り曲げて、長さを縮めて打ち上げられます。SSRMSは、7個の関節部を持つ左右対称の腕であり、手に相当する部分になる両端のエンドエフェクタ(LEE:
Latching End Effector)でグラプルフィクスチャ(PDGF:Power and Data Grapple Fixture)と呼ばれる把持台座を交互につかんで、シャクトリムシのように移動することができます。これは、今までのスペースシャトルのロボットアームには無かった新しい機能です。
PDGFは、SSRMSのLEEの把持部になると共に、ISSとSSRMS間の電力とデータ通信、ビデオデータの伝送経路として使われます。SSRMSはこのPDGF以外にも、従来使用していた(電力やデータ通信のインタフェースを持たない)型のグラプルフィクスチャ(FRGF:Flight
Releasable Grapple Fixture)を使用することができるため、トラスや、各モジュール、ペイロード等には、このPDGFかFRGFのどちらかが必ず設置されます。ただし今回の6Aフライトの時点では、デスティニーに取り付けられている1個の
PDGFしかありません。
| UHFアンテナ |
UHFアンテナ | UHFアンテナはSSRMSと同様に、SLPに固定して輸送されます。ISSにUHF通信システムが導入されると、ISSから直接、外部との無線による通信ができるようになります。このUHFシステムのトランシーバー等の機器は、デスティニー内にすでに設置されていますので、今回のフライトでISSの外部にアンテナを取り付れば、このシステムは使えるようになります。
現在は、ISSに近づいてくるスペースシャトルあるいは離れていくスペースシャトルとISSは直接交信することができないので、ヒューストンを経由して交信しています。船外活動クルーはスペースシャトルとは無線で交信できますので、ISSとスペースシャトルが結合している間は、ISSからもスペースシャトルを経由して船外活動クルーと交信することができます。しかしスペースシャトルの帰還後には、船外活動クルーとISS内のクルーは、現状では交信することができません。ISSから船外活動を実施するためには、エアロック(この次の7Aフライトで取り付ける予定)と供に、このUHFによる通信システムが不可欠です。
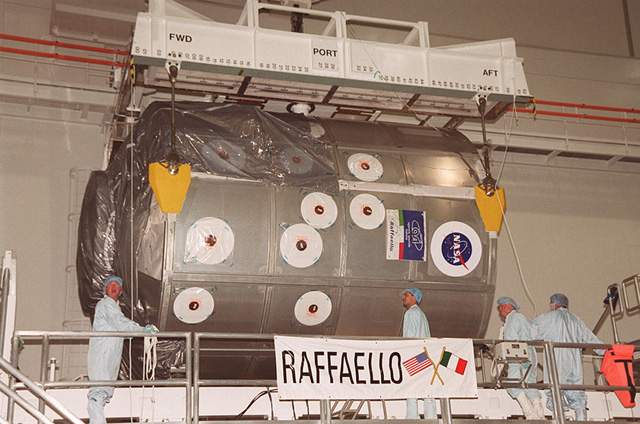
| 多目的補給モジュール(MPLM)「ラファエロ」 |

多目的補給モジュール(MPLM)ラファエロ | MPLMはイタリア宇宙機関(ASI)が開発した、与圧補給品をISSへ運ぶモジュールで、3機が開発されており、それぞれ、「レオナルド」、「ラファエロ」、「ドナテロ」という愛称が付けられています。今回飛行するのは、2号機の「ラファエロ」です。
ラファエロはスペースシャトルの貨物室(ペイロードベイ)に搭載して打ち上げられ、スペースシャトルのロボットアームでISSのユニティの下側の共通結合機構(CBM:Common
Berthing Mechanism)に結合して、クルーがラックや物品の搬入搬出を行います。作業終了後は、CBMによる結合を解除して、再びスペースシャトルの貨物室に積み込み地球へ持ち帰ります。
5AフライトまではスペースシャトルとISS間の物資の移動は、全てスペースシャトルとISSとのドッキングポートである与圧結合アダプター(PMA:Pressurized
Mating Adapter)を経由していましたが、PMAの出入り口(ハッチ)は内径が約60cmしかないので、移動できる物資のサイズはかなり制限されていました。MPLMのCBMハッチは縦横約130cmあるので、大型の機器やラックなどの搬入ができるようになるほか、搬入作業を迅速に行うことができるようになります。MPLM内には、最大16台のラックを搭載でき、このうち、最大5台のラックには電力を供給することができるので、冷凍冷蔵庫ラックなども電力を供給しながら打ち上げることができます。
MPLMの諸元 | 全長 | :約6.6m |
| 外部直径 | :約4.5m | | 容積 | :76.4m3 | | 打上げ時重量 | :9,072kg(最大5tの貨物を搭載) |
| CBMハッチ開口部 | :1.3m×1.3m(他の与圧モジュールと同じ) |
| ラファエロ内搭載物 |
6Aフライトでは、ラファエロには2基の実験装置収納ラック(EXPRESSラック)、4基の補給品収納プラットフォーム(RSP)、4基の補給品収納ラック(RSR)の、計10台のラックが搭載されます。RSPやRSR内には次回7Aフライトで打ち上げるエアロックの艤装品や予備品等が搭載されるほか、EXPRESSラックに設置する実験装置の一部や食料品衣服、タオル、搭乗員の健康管理機器等が搭載されています。
- 実験装置収納ラック(EXPRESSラック)
実験装置収納ラックは宇宙実験実施までの準備期間を短縮するとともに、インテグレーション(ハードウエアやソフトウエアをかみ合わせた組立調整)作業を軽減するために開発されたラックで、1997年のSTS-83/94(MSL-1/1R)で飛行試験を行った実績があります。この6Aフライトでは、2台のEXPRESSラックがラファエロで運ばれ、デスティニーに設置される予定です。
各ラックにはそれぞれ6個と4個の小型の実験装置が搭載されています。
- 補給品収納プラットフォーム(RSP)
RSPは、サイズの大きな補給品を運ぶためのキャリアで、バッグに収納した補給品をMPLM内に固定するための型枠のようなものです。6Aフライトでは4台のRSPを運びます。補給品を取り出したバッグはRSP上の元の位置に戻され、RSPそのものもMPLMに搭載したまま地球に持ち帰ります。
- 補給品収納ラック(RSR)
サイズの小さな補給品を運ぶための引き出しを備えたラックです。6Aフライトでは4台のRSRを運びます。引き出しから補給品を取り出してISSに搬入し空になったRSRは、MPLMに搭載したまま地球に持ち帰ります。
注:空になったRSP, RSRには、着終わった衣類やゴミ、梱包材等の不要品をISSから積み込んで、地球に持ち帰ります。
|