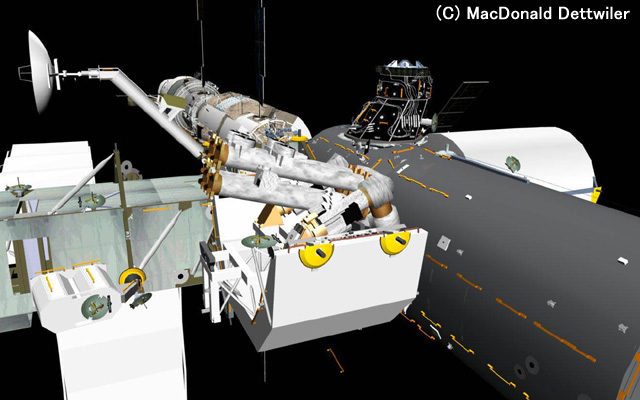
پ@SLPڈم‚جSSRMS‚حپA‘DٹOٹˆ“®‚إ“d‹C”zگü‚ًگع‘±‚·‚邱‚ئ‚ة‚و‚èپAƒfƒXƒeƒBƒjپ[‚©‚çSLP‚ًŒo—R‚µ‚ؤ“d—ح‚âگ§ŒنگMچ†‚ً‹ں‹‹‚إ‚«‚é‚و‚¤‚ة‚ب‚è‚ـ‚·پB
پ@SSRMS‚حچ¶‰E‘خڈج‚جŒ`‚ً‚µ‚ؤ‚¨‚èپAکr‚ج—¼’[‚ح•¨‚ً‚آ‚©‚ق‚±‚ئ‚ھ‚إ‚«‚éچ\‘¢‚ة‚ب‚ء‚ؤ‚¢‚ـ‚·پB‚ـ‚½کr‚ج’†‰›‚ة‚حٹضگك‚ھ‚ ‚èگـ‚è‹ب‚°‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پB |
پ@‘إ‚؟ڈم‚°ژ‚ة‚حپAƒAپ[ƒ€‚ج’·‚³‚ً’Z‚‚·‚é•K—v‚ھ‚ ‚邽‚كپASLPڈم‚ةژl‚آگـ‚è‚جڈَ‘شپi‚¨‚و‚»5m’ِ“x‚ج’·‚³پj‚إŒإ’肳‚ê‚ؤ‚¢‚ـ‚·پB |
|
|
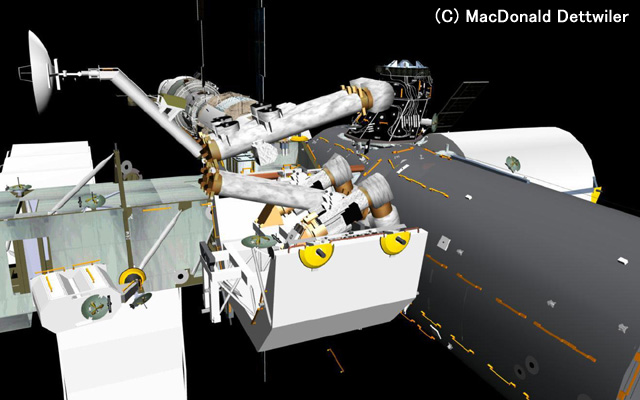
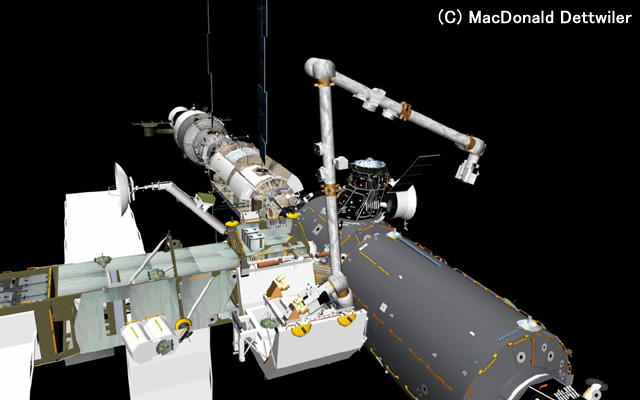
پ@‘DٹOٹˆ“®ƒNƒ‹پ[‚ھپAژè‚إSSRMS‚جکr‚ًژ‚؟ڈم‚°‚ؤ“r’†‚ـ‚إ‹N‚±‚µپAژl‚آگـ‚è‚©‚ç“ٌ‚آگـ‚è‚جڈَ‘ش‚ةگL‚خ‚µپAگL‚خ‚µ‚½ٹضگك‚ًƒ{ƒ‹ƒg‚إŒإ’肵‚ـ‚·پB |
|
|
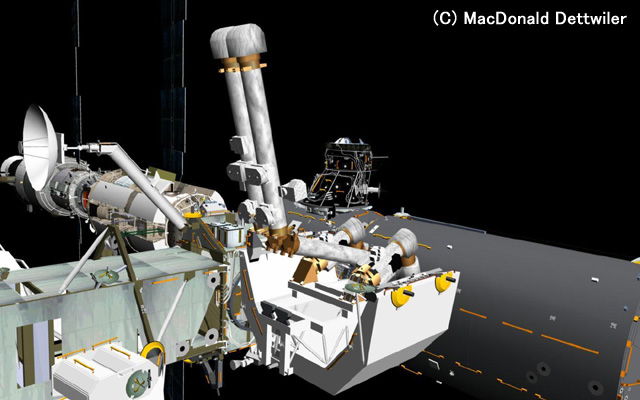
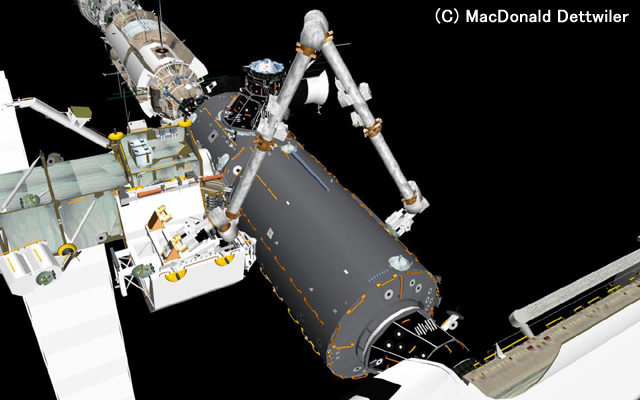
پ@‚»‚جŒمپA•ذ•û‚جکr‚جژèژٌٹضگك‚àگL‚خ‚µ‚ؤƒfƒXƒeƒBƒjپ[ڈم‚جSSRMS—p‚ج‘نچہپiPDGF:Power and Data Grapple Fixtureپj‚ً‚آ‚©‚ف‚ـ‚· |
|
|
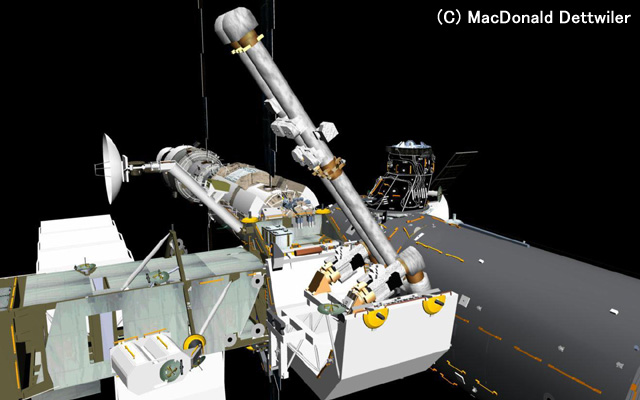
پ@PDGF‚ً‚آ‚©‚فپA‚»‚ê‚ـ‚إSLPŒo—R‚إ‹ں‹‹‚µ‚ؤ‚¢‚½“d—ح‚ئگ§ŒنگMچ†‚ًPDGF‘¤‚©‚ç‹ں‹‹‚·‚é‚و‚¤‚ةگط‚è‘ض‚¦‚ھٹ®—¹‚·‚é‚ئپASSRMS‚حISS‚ةژو‚è•t‚¯‚ç‚ꂽ‚±‚ئ‚ة‚ب‚è‚ـ‚·پBPDGF‚ً‚آ‚©‚ٌ‚¾کr‚ح‚±‚جژ“_‚إSSRMS‚ج‹r•”‚ئ‚ب‚èپA”½‘خ‘¤‚جکr‚حƒچƒ{ƒbƒgƒAپ[ƒ€‚جکr‚ئ‚µ‚ؤ‹@”\‚·‚邱‚ئ‚ة‚ب‚è‚ـ‚·پBپiSSRMS‚حژعژو‚è’ژ‚ج‚و‚¤‚ةˆع“®‚·‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پBƒAپ[ƒ€‚ج—¼’[‚حکr‚ئ‚µ‚ؤ‚àپA‹r•”‚ئ‚µ‚ؤ‚à‹@”\‚µ‚ـ‚·‚ج‚إپA‚»‚ج‚ئ‚«‚جکr‚إ•ت‚جPDFG‚ً‚آ‚©‚ق‚ئ‚»‚جکr‚ھ‹r•”‚ئ‚ب‚èپA‚»‚ê‚ـ‚إ‚ج‹r•”‚حکr‚ئ‚µ‚ؤ‹@”\‚·‚é‚ئ‚¢‚¤‚و‚¤‚ةپA–ًٹ„‚ھ“ü‚ê‘ض‚ي‚é‚ج‚إ‚·پBپj |