|
||||||

若田宇宙飛行士に、STS-92ミッションについてお話を伺いました。 Q1. 今度のミッションの若田宇宙飛行士の主な任務を教えて下さい。 若田. スペースシャトルディスカバリー号によるSTS-92ミッションでは、シャトルのマニピュレータ・システム(ロボット・アーム)の操作が担当任務の中では最も重要なものです。 スペースシャトルがISSにドッキングした後、ロボットアームを使って、 ISSの通信システムや姿勢制御システムを搭載したZ-1トラスという構造体や、ISSとスペースシャトルのドッキング・ポートとなるPMA-3(Pressurized Mating Adapter - 3)を、軌道上のISS本体に取り付けたり、 4回実施される船外活動をロボットアームで支援したりする予定です。 Q2. 今度のミッションに向けてどのような訓練を受けていますか。
来年春の打ち上げに向け、スペースシャトルの打ち上げ、帰還の訓練、軌道上でISSの構成要素を組み立てる作業の訓練が中心です。特に最近は、打ち上げ時のシャトルシステム操作訓練、船外活動やロボットアームの操作を含む軌道上でのISS組立作業、さらに軌道離脱、大気圏突入、着陸等の飛行フェイズの訓練にかなりの時間を割いています。 また、軌道上の組立作業については、NASAが初めて行う作業が多いため、訓練と共に、設計技術者やミッションコントロールセンタの管制官とのブレインストーミング的な運用計画会議もかなり多くなっています。 Q3. ロボットアームの操作は、難しいですか?
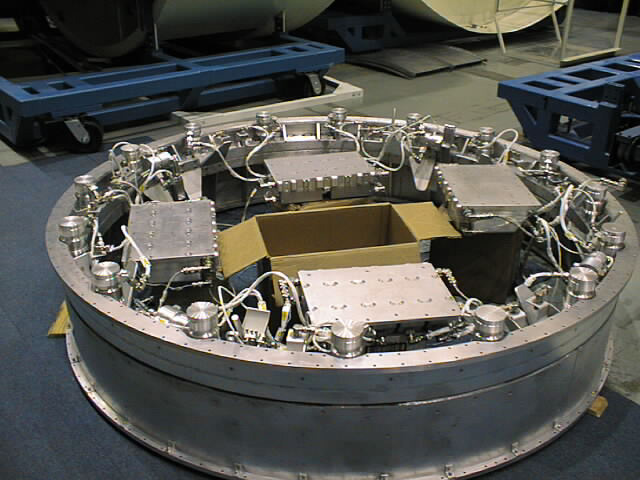
1つは、Z-1トラスおよびPMA-3とも、ISSで様々なモジュールの結合に用いる「共通結合機構」というメカニズムを用いて取り付けを行うという点で、今回のミッションでは、この機構を用いた宇宙での初めての結合作業を行います。(この共通結合機構は日本の宇宙実験モジュール「きぼう」にも使われます。) 共通結合機構の取り付け時のロボットアーム操作は、許容される位置姿勢誤差が非常に小さいため、正確なアーム操作が要求されます。特にロボットアームの制御計算機が故障した場合に備えて、アームを各関節毎に手動で動かす操作訓練もしていますが、この場合は、さらに慎重に操作を行わなければなりません。 もう1つは、これらの取り付け作業をする時に、その取り付け機構部が直接目視或いはテレビカメラによってもよく見えないため、コンピュータによる画像解析で、 Z-1トラスやPMA-3の位置や姿勢を測定しながらアーム操作を行わなければならないという点で、これが取り付け作業を複雑にしています。どの作業も気の抜けないものですが、ロボットアームを使って日本の人工衛星SFUを回収した前回の宇宙飛行での経験を十分に生かして、是非よい仕事ができるよう訓練に励んでいます。 Q4. 最後に、宇宙飛行士になってよかったですか。  若田. はい。今、ISSという、世界の人々がその英知を出し合って共に人類としての活動領域を拡げていく夢のある仕事に携われることにとても大きなやりがいを感じています。そして21世紀は、日本からももっともっと多くの方々が宇宙を舞台に活躍する時代になることを確信しています。
|