
国際宇宙ステーション (ISS) とスペースシャトルのランデブはディスカバリー号の打上げの時点から始まっており、打上げから48時間の間、ランデブのための数回の軌道制御がスペースシャトルで行われ、ISSの軌道に徐々に接近します。
飛行3日目のスペースシャトルによるISSへの最終接近は、ダフィー船長の手動操縦によって行われます。これはISSの600フィート(約183m)下の方(地球方向)から上に向かって接近する方法(-R-Barまたはradius
vector(半径方向のベクトル)と呼ぶ方法)で行われます。
スペースシャトルがISSと至近距離まで接近すると、最後に軽くスラスターを噴射させて、スペースシャトルのドッキング装置とISSのPMA-2(与圧結合アダプター2)を結合させます。
 |
ランデブの原理とR-Barによる接近方法 |
-
 |
ランデブの基本原理 |
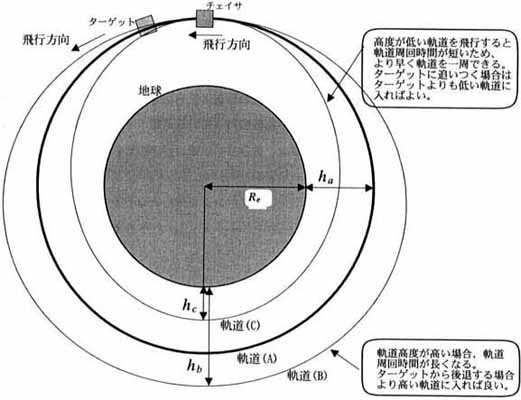
下図は、軌道上の宇宙機のランデブ軌道を模式的に表した物です。
下図で、ターゲット(目標)はISS、チェイサ(追跡する側)はそれを追いかけて軌道変更を行うスペースシャトルと考えて下さい。
両者が同一の軌道である場合には、両宇宙機は常に一定の距離を保ったまま、飛行します。このとき、ターゲットに追いつくために、チェイサが飛行速度を上げると、両者は一時的には近づきますが、飛行速度を増加したため、チェイサの軌道半径が大きくなり、意に反してターゲットから遠ざかってしまいます。
すなわち、ターゲットから見るとチェイサが上方向にずれてゆくように見えます。従って、ターゲットにチェイサが接近するようにするためには、逆に速度を落として軌道半径を小さくして軌道周期を短くすることが必要です。この場合、チェイサは一旦、ターゲットから遠ざかりますが、軌道周期が短いために次第にターゲットに接近することになります。その後、再度、速度を増加してターゲットと同じ軌道に戻ります。これが、ランデブの基本原理であり、スペースシャトルは打上げから3日目までは、このような軌道制御を行って徐々にISSの軌道に近づきます。
ランデブの原理の概略説明図
|
ISSへの最終接近 |
上述したようなランデブ方法(V-Barまたはvelocity vector(速度ベクトル)と呼びます)でもターゲットに最終接近することは可能であり、今後の宇宙ステーションの組立ミッションでも使用される予定ですが、今回のミッションではロシアの地上局との通信リンクを確保する関係等から-R-Bar方式で接近を行います。R-Barは、接近時のスラスタ制御を停止すれば自然にブレーキがかかるという特徴を持っており、スペースシャトルとミールのドッキングミッション時などにも使われた方式です。
R-Bar方式は、ターゲット(ISS)の下後方(地球方向)から、スペースシャトルの地球方向のスラスタを噴射して上昇させることにより軌道半径をすこしづつ変化させて、ターゲット(ISS)の方に接近する方法です。
|


