|
飛行4日目ミッション概要 |
Z1トラスの取付け、国際宇宙ステーション(ISS)内への入室(1回目)(ザーリャまで入室)/退室、船外活動に備えてオービタ内を10.2psia
(約2/3気圧)へ減圧
(1) Z1トラスの取付け
スペースシャトルのロボットアームを起動します。また、取付け側となるユニティ天頂部のACBM(アクティブ側の共通結合機構)を起動し点検します。ACBMのキャプチャー・ラッチは動作確認を行った後、結合に備えて展開状態にされます。
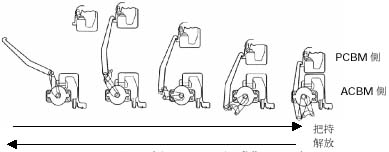
ペイロードベイ(貨物室)に固定しているZ1トラスをロボットアームで把持します。その後、Z1トラスをスペースシャトルに固定している機構を解除し、ロボットアームにてZ1を結合が可能な位置まで移動させます。
Z1トラスとユニティをCBM(共通結合機構)結合させます。その後、ロボットアームのZ1トラスの把持が解除されます。
(2) ISS内への入室(1回目)/退室
3日目に続いて、ISS内への物資の搬入作業が行われます。また、Z1トラス接続部(CBM)の船内側準備作業などが行われます。
(3) 船外活動(EVA)に備えてオービタ内を10.2 psia(約2/3気圧)へ減圧
船外活動前に行われる事前呼吸(プレブリース)時間を短くするため、4日目の夜からオービタ内の気圧を約2/3 気圧に下げて、EVAに備えます。
ハイライト/トピックス
Z1トラスとユニティの結合は、軌道上での初めての共通結合機構(CBM:Common Berthing Mechanism)結合作業となります。CBMは、ロシア以外の与圧されたISSの構成要素同士を結合するために使用される共通的な結合機構であり、「きぼう」日本実験棟においても使用される結合機構です。また、結合のためのロボットアーム操作は、ユニティ/PMA-2がスペースシャトル後方フライトデッキの窓の視野を遮ってしまい、直接目視確認ができないため、カメラや宇宙視覚システム(SVS:Space
Vision System)によるTV画面を見ながらの操作となります。
この作業は、PMA-3の取り付けと共に今回のミッションでの一番の見所です。 |
|