| The
second operability evaluation test(HIL #2) of the robot arm for Japanese Experiment
Module "Kibo" |
|

Test Scene | The second operability evaluation test of the robot
arm for Japanese Experiment Module "Kibo" of the International Space
Station was held at Tsukuba Space Center from May 21 to June 1. Here is the report
of the May 23 test that was conducted by Japanese astronaut Wakata.
 What is an operability evaluation
test of the robot-arm for Japanese Experiment Module "Kibo?" What is an operability evaluation
test of the robot-arm for Japanese Experiment Module "Kibo?"
The operability evaluation test is called a Human In the Loop (HIL)
Test. Astronauts actually operate the robot arm to confirm and evaluate
its operability. HIL #1 was conducted
in March 2000 by five astronauts, including astronaut Doi. Operability
of the main arm and the robot arm console was tested, resulting in several
improvement recommendations including data display image design. Overall,
the system was evaluated highly by the astronauts.
|
The Second Human in the Loop Test |

Main Arm and Small Fine Arm Combination Test |
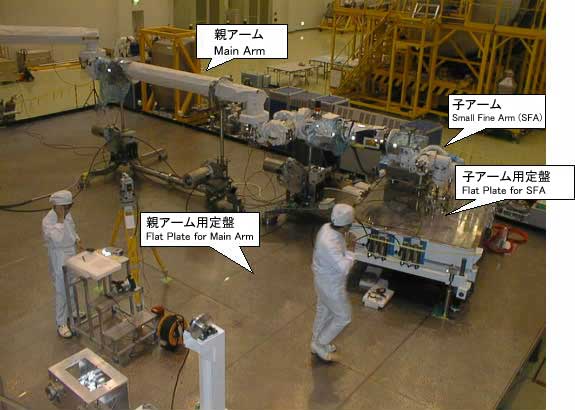
During the Second Human In the Loop Test (HIL #2), the overall operability
was tested using a flight model of the Small Fine Arm (SFA). This could
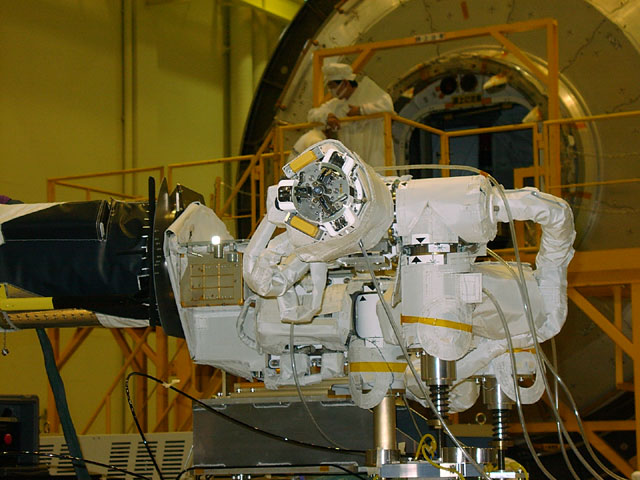
not be conducted during HIL #1. As shown in the picture, the SFA was connected
to the main arm. The combination was thus tested on the flat plate performing
a typical procedure combining the main arm and SFA. The combination was
evaluated from the viewpoint of operation, data display visibility, and
response of the SFA. Astronauts Doi, Wakata, Garett and Swanson participated
during the test, (May 21 to June 1).
-

Astronaut Wakata at the Console | 
Small Fine Arm |
| Astronaut
Wakata's comments |  |  |
Astronaut
Wakata answering reporters' questions |
When Astronaut Wakata finished testing, he gave us the comments below.
Kibo's robot arm combining the main arm and SFA has many functions that
the Shuttle robot arm does not have. Kibo's robot arm has been designed
to be easy for astronauts to use
Robot arm technologies and operation experience from the Manipulator Flight
Demonstration test (STS-85) in 1997 and on ETS-7 (Engineering Test Satellite
7), conducted from 1998 through 1999 are reflected in the design of Kibo's
robot arm. This makes me feel that Japan's robot arm technology is steadily
evolving. The robot arm I tested is being developed properly. I feel our
robot arm will be utilized in space without any problem.
| Future
Plan |
Following HIL #2, a robot arm system test will be conducted in mid June.
From July through August 2001, a post-qualification test review will be
conducted to confirm that various development requirements have been evaluated
appropriately. A comprehensive Kibo system test is scheduled from October
through April 2002. Following those tests, a series of compatibility tests
with ground facilities or payloads will be conducted. Around 2003, Kibo's
robot arm console, that is scheduled to be launched first as a part of
Kibo, will be shipped to Kennedy Space Center. (The main arm and the SFA
will be shipped to Kennedy Space Center separately in the order of launch
schedule.)
Last Updated :October 31, 2002
|