| Thermal Vacuum Test of Kibo's Manipulator Main Arm |
|
A Thermal Vacuum Test of Japanese Experiment
Module Kibo's Manipulator Main Arm was conducted at the Tsukuba Space Center from
June 29 to August 27, 1999.
 | Kibo's
Manipulator |  |
| Main arm and Small fine arm |
Kibo's manipulator is a robot
arm. It consists of three components, the main arm, small fine arm, and manipulator
console. The main arm will be used to manipulate large objects. The small fine
arm will be attached to the end of the main arm and will be used to conduct fine
manipulations. The manipulator console will be used to control both the main arm
and the small fine arm. This manipulator will be used for exchanging experiment
payloads or onboard equipment, and for supporting experiments or maintenance tasks.
| Thermal
vacuum test |
Temperatures in space range from 120C (248F) in the sun to -150C (-238F)
in the shade, a difference of 270C (486F). Also, in space, heat is transferred
only by conduction and radiation; there is no convection. As a result,
things heat up and cool down very quickly. Since the ISS circles the Earth
in about 90 minutes, the ISS will heat up and cool down every 45 minutes.
Kibo's manipulator is thermally protected by thermal insulator and by heaters.
The manipulator will be able to continue working for the 10-year ISS operational
life, in spite of such great temperature swings because it is covered by thermal
insulation. Furthermore, heater power will be turned on and off to keep its temperature
within the required range.
This proof test is conducted to confirm that
temperatures of the main arm's parts can be kept within the required range. The
test results will be compared with the simulation output from the thermal model
developed during the design phase. If a significant difference is found between
them, the thermal math model will be revised.
| Test
Procedure | 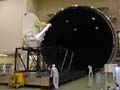 |  |
| Placing the main arm in the
13m diameter space chamber. | A 13m diameter space chamber
is used for this test. It can simulate the space vacuum and thermal environments.
With the main arm inside, the air is removed to create a vacuum, and the wall
is cooled by liquid nitrogen. Temperatures in about 180 locations on the main
arm are then measured while applying simulated solar light to simulate the sunny
and shaded environment. Xenon arc lamps, which have an optical spectrum similar
to that of the sun, are used to simulate the solar light.
This test was
conducted in the following two cases.
| 1) | Launch
configuration | 
Retracted position for launch | | | Kibo's
manipulator will be launched in the cargo bay of the Space Shuttle. It will be
attached to the Pressurized Module of Kibo with its arm bent in the retracted
position and power turned off. The manipulator is covered by multilayer insulator
(MLI). The MLI covering the joints will be removed by astronauts during extravehicular
activity when Kibo is attached to the International Space Station (ISS) and its
power is turned on. | | | | |
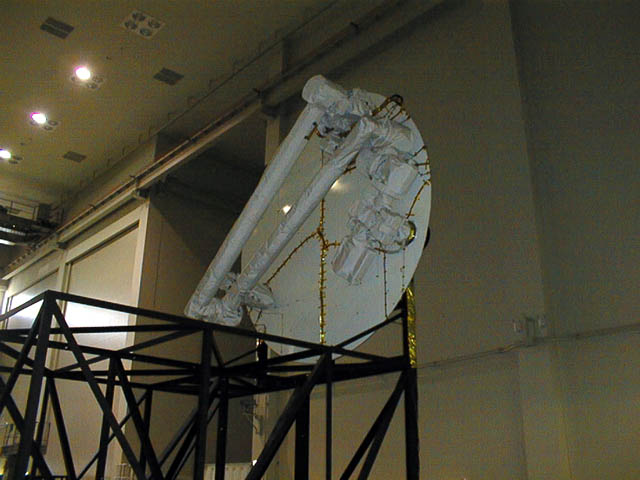
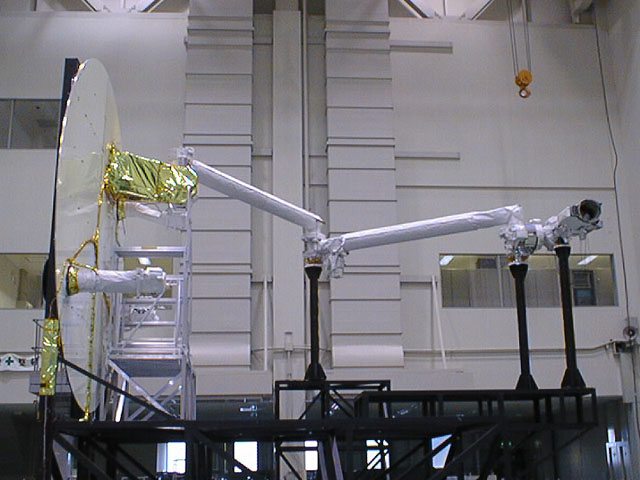
| 2) | Initial position in orbit | 
Initial position in orbit | | | The
initial position is the position taken first when the manipulator is used in orbit.
When the manipulator grasps or manipulates an object, it will take this initial
position first then proceed to the next action. Power will be turned on beforehand.
Since the manipulator was designed to operate in a zero-gravity environment, the
manipulator is turned 90 degrees and supporting poles are inserted under the joints
to minimize gravitational effects. |
A thermal math model is a mathematical equations
which represents manipulator temperature conditions in a space environment. Items
that are impossible to test on the Earth are evaluated by simulation using this
thermal math model. For instance, the manipulator temperature will be affected
by thermal sources other than solar radiation, such as radiation from Kibo's exposed
facility, or the heat generated by the actions of the manipulator itself.
It would be convenient to conduct these tests on the ground systematically
and consequently proved the manipulator's thermal design to be reasonable. However,
since the manipulator was designed to be operated only in a zero-gravity environment,
manipulator movement tests cannot be conducted in the direction of gravitational
force. Also, since we have no test facility capable of accommodating the total
Kibo system, it is impossible to test all of the cases. The thermal math model
is utilized to cover these cases.
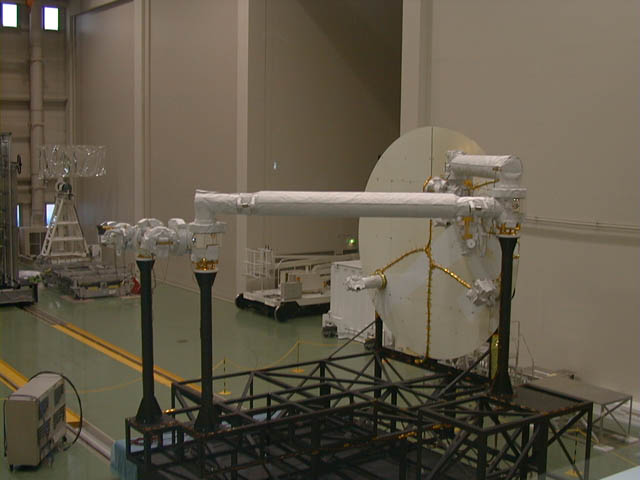
| Comments
from the key person |  | It
takes up to one and a half days to remove the air in the space chamber to create
a vacuum. Furthermore, the test scale is quite large, so we have to be very careful
in preparing for the test. During this test period, we attached the manipulator
to the thermal dummy of Kibo's pressurized module, and set the manipulator in
its initial position in orbit. This is the first and the last opportunity for
Kibo's manipulator to take this position on Earth, so the picture here is precious. |  |
| Manipulator is
attached to Kibo's thermal dummy and is set to its initial position. | Mr.
Shinnji Ueno
JEM Project Team
Office of Space Utilization Systems
NASDA
|
Last Updated : November 25, 1999
|