Z1 truss |
 |
Z1truss |
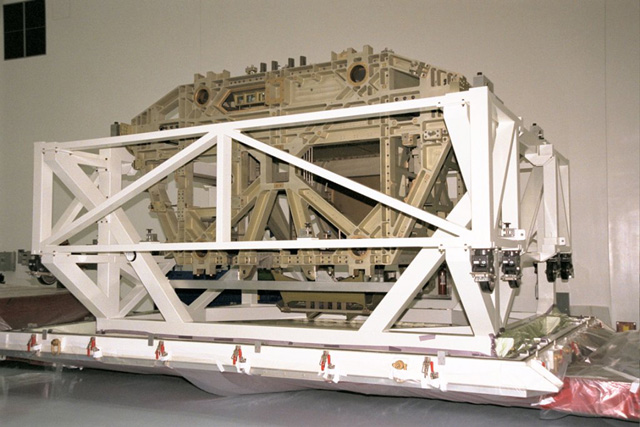
The Z1 truss is an early exterior framework to allow first U.S. solar arrays on
flight 4A to be temporarily installed on Unity for early power. It weighs
8.3t and is 4 to 5m in length and width. It is made of aluminum alloy and
will be attached to the Unity module during mission STS-92.
It includes four control moment gyros (CMGs) that perform
attitude control, S-band and K-band antennas for communicating with ground
stations, and DC-to-DC converter Units(DDCUs) .
The CMGs and communications antennas will be launched mounted on the Z1
truss; the DDCUs and EVA Tool Stowage Devices(ETSD) will be attached to
the Z1 truss by EVAs.
Structure of the Z1 truss
The P6 truss (with
solar arrays)
will be installed in this direction. |
|
Zarya and
Zvezda are to
be oriented in this direction. |
 |
|
| |
The shuttle docking
port (PMA-2)
is to face this direction. |
|
View from opposite side of MBM |
MBM(Manual Berthing Mechanism)
ETSD(EVA Tool Stowage Device)
RPCM(Remote Power Controller Module
SGANT(Space-to-Ground Antenna) |
A common berthing mechanism (CBM) will be used for the first time to connect Unity
and the Z1 truss.
The CBM is a commonly used mechanism to connect non-Russian pressurized
modules. Two pressurized modules will be brought to the connection position
using a robot arm, and the each modules latch mechanisms will be connected
by driving a motor which includes active CBM(ACBM). Once the connection
is established, the CBM will Provide the resource connection such as, electrical
power, communication signals, and fluid between the connected modules. It
also serves as a path for the crew. A total of six CBMs will be mounted
on each nodes. At present, only Unity (node-1) has been launched. A CBM
will also be used to connect the Japanese Experiment module "Kibo"
to the ISS.
Connecting modules using the CBM is an extremely difficult operation that
requires fine robot arm manipulations. Cooperation between crew members
is also important. The Passive CBM(PCBM) that takes the passive position
will be launched attached to the Z1 truss.
 |
PCBM
(passive CBM, Z1 truss side) |
ACBM
(Active CBM, Unity side) |
Control moment gyro (CMG) |
A CMG generates torque to control large spacecraft. It can generate larger
angular momentum and torque than the reaction wheels (*1) used for satellite
attitude control.
In a CMG, a flywheel(*2) attached to the gimbal(*3) is rotated at a constant
speed (6,600rpm for ISS), generating a large angular momentum. Since the
gimbal containing the flywheel tries to maintain a constant direction,
any action by another motor to tilt this gimbal generates a large torque.
This is the same gyro effect you can experience when spinning a toy top.
The magnitude of this force is the product of the angular momentum of the
flywheel and the rotation speed of the gimbal. This method can generate
dozens of times greater torque than a reaction wheel. CMGs have been used
in the US Skylab and in the Russian space station Mir.
CMGs will be launched attached to the Z1 truss, and activated on flight
5A.
*1. Reaction wheel: Used to change a satellite attitude by the reaction
of acceleration or deceleration torque generated by changing the rotation
speed of the flywheel.
*2. Gimbal: A device that allows an attached system to take any desired
attitude. Installed in stands of ship compasses and airborne cameras.
*3. Flywheel: A device used to maintain a stable attitude; stores angular
momentum by rotating a wheel with a mass.
The S-band communication system will transmit and receive ISS operation
data and voice data to and from Earth.
The Ku-band communication system will transmit large amount of various data
to Earth obtained from experiments on ISS as well as image, voice and other
data.
| Last Updated : September 28, 2000 |
|